Rezolvați sistemul de ecuații folosind calculul matriceal online. Soluție Matrice
Metoda matricei Solutii SLAU folosit pentru rezolvarea sistemelor de ecuații în care numărul de ecuații corespunde numărului de necunoscute. Metoda este cel mai bine utilizată pentru rezolvarea sistemelor de ordin scăzut. Metoda matriceală pentru rezolvarea sistemelor de ecuații liniare se bazează pe aplicarea proprietăților înmulțirii matriceale.
Astfel, cu alte cuvinte metoda matricei inverse, numit așa, deoarece soluția este redusă la ecuația matriceală obișnuită, pentru a cărei soluție trebuie să găsiți matricea inversă.
Metoda soluției matriceale Un SLAE cu un determinant mai mare sau mai mic decât zero este după cum urmează:
Să presupunem că există un SLE (sistem de ecuații liniare) cu n necunoscut (pe un câmp arbitrar):
Deci, este ușor să îl traduceți într-o formă de matrice:
AX=B, Unde A este matricea principală a sistemului, BȘi X- coloane de membri liberi și soluții ale sistemului, respectiv:

Să o înmulțim ecuația matriceală lasat sa A -1- matrice inversă la matrice A: A −1 (AX)=A −1 B.
Deoarece A -1 A=E, Mijloace, X=A -1 B. Partea dreaptă ecuația oferă o coloană de soluții sistemului inițial. Condiția pentru aplicabilitatea metodei matricei este nedegenerarea matricei A. O condiție necesară și suficientă pentru aceasta este ca determinantul matricei A:
detA≠0.
Pentru sistem omogen de ecuații liniare, adică dacă vector B=0, este valabilă regula opusă: sistemul AX=0 este o soluție netrivială (adică nu este egală cu zero) numai atunci când detA=0. Această legătură între soluțiile sistemelor omogene și neomogene de ecuații liniare se numește alternativă la Fredholm.
Astfel, soluția SLAE metoda matricei produs conform formulei ![]() . Sau, soluția SLAE este găsită folosind matrice inversă A -1.
. Sau, soluția SLAE este găsită folosind matrice inversă A -1.
Se știe că o matrice pătrată A Ordin n pe n Există matrice inversă A -1 numai dacă determinantul său este diferit de zero. Astfel sistemul n liniar ecuații algebrice Cu n necunoscutele se rezolvă prin metoda matricei numai dacă determinantul matricei principale a sistemului nu este egal cu zero.
În ciuda faptului că există restricții cu privire la posibilitatea utilizării unei astfel de metode și există dificultăți de calcul pentru valori mari ale coeficienților și sistemelor ordin înalt, metoda poate fi implementată cu ușurință pe un computer.
Un exemplu de rezolvare a unui SLAE neomogen.

Mai întâi, să verificăm dacă determinantul matricei de coeficienți pentru SLAE-uri necunoscute nu este egal cu zero.



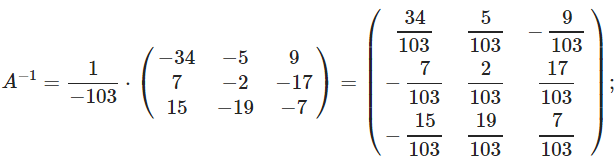
Acum găsim matricea aliantei, transpuneți-l și înlocuiți-l în formula de determinare a matricei inverse.

Inlocuim variabilele din formula:
Acum găsim necunoscutele înmulțind matricea inversă și coloana de termeni liberi.

Asa de, x=2; y=1; z=4.
Când treceți de la forma obișnuită a SLAE la forma matriceală, aveți grijă la ordinea variabilelor necunoscute în ecuațiile sistemului. De exemplu:

NU scrie ca:

Este necesar, mai întâi, să ordonăm variabilele necunoscute în fiecare ecuație a sistemului și numai după aceea se trece la notația matriceală:


În plus, trebuie să fii atent cu desemnarea variabilelor necunoscute, în loc de x 1, x 2 , …, x n pot exista si alte litere. De exemplu:

sub formă de matrice, scriem:

Este mai bine să rezolvați sistemele folosind metoda matricei ecuatii lineare, în care numărul de ecuații coincide cu numărul de variabile necunoscute și determinantul matricei principale a sistemului nu este egal cu zero. Când există mai mult de 3 ecuații în sistem, va fi nevoie de mai mult efort de calcul pentru a găsi matricea inversă, prin urmare, în acest caz, este recomandabil să folosiți metoda Gauss pentru a rezolva.
Sistem de m ecuații liniare cu n necunoscute numit un sistem al formei
Unde aijȘi b i (i=1,…,m; b=1,…,n) sunt câteva numere cunoscute și x 1 ,…,x n- necunoscut. În notarea coeficienților aij primul indice i denotă numărul ecuației, iar al doilea j este numărul necunoscutului la care se află acest coeficient.
Coeficienții pentru necunoscute se vor scrie sub forma unei matrice  , pe care o vom numi matricea sistemului.
, pe care o vom numi matricea sistemului.
Numerele din partea dreaptă a ecuațiilor b 1 ,…,b m numit membri liberi.
Agregat n numere c 1 ,…,c n numit decizie a acestui sistem, dacă fiecare ecuație a sistemului devine o egalitate după înlocuirea numerelor în ea c 1 ,…,c nîn locul necunoscutelor corespunzătoare x 1 ,…,x n.
Sarcina noastră va fi să găsim soluții pentru sistem. În acest caz, pot apărea trei situații:
Un sistem de ecuații liniare care are cel puțin o soluție se numește comun. Altfel, i.e. dacă sistemul nu are soluții, atunci este numit incompatibil.
Luați în considerare modalități de a găsi soluții pentru sistem.
METODĂ MATRIXĂ PENTRU REZOLVAREA SISTEMELOR DE ECUAȚII LINARE
Matricele fac posibilă scrierea pe scurt a unui sistem de ecuații liniare. Să fie dat un sistem de 3 ecuații cu trei necunoscute:
Luați în considerare matricea sistemului  și coloane matrice de membri necunoscuți și liberi
și coloane matrice de membri necunoscuți și liberi 
Să găsim produsul

acestea. ca rezultat al produsului, obținem părțile din stânga ecuațiilor acestui sistem. Apoi, folosind definiția egalității matriceale acest sistem poate fi scris sub forma
 sau mai scurt A∙X=B.
sau mai scurt A∙X=B.
Aici matrice AȘi B sunt cunoscute, iar matricea X necunoscut. Ea trebuie găsită, pentru că. elementele sale sunt soluția acestui sistem. Această ecuație se numește ecuația matriceală.
Fie determinantul matricei diferit de zero | A| ≠ 0. Atunci ecuația matriceală se rezolvă după cum urmează. Înmulțiți ambele părți ale ecuației din stânga cu matricea A-1, inversul matricei A: . Deoarece A -1 A = EȘi E∙X=X, apoi obținem soluția ecuației matriceale sub forma X = A -1 B .
Rețineți că, deoarece matricea inversă poate fi găsită numai pentru matrice pătrată, metoda matricei poate rezolva numai acele sisteme în care numărul de ecuații este același cu numărul de necunoscute. Cu toate acestea, notația matriceală a sistemului este posibilă și în cazul în care numărul de ecuații nu este egal cu numărul de necunoscute, atunci matricea A nu este pătrat și, prin urmare, este imposibil să găsiți o soluție la sistem în formă X = A -1 B.
Exemple. Rezolvarea sistemelor de ecuații.

REGULA LUI CRAMER
Să considerăm un sistem de 3 ecuații liniare cu trei necunoscute:
Determinant de ordinul trei corespunzător matricei sistemului, i.e. compus din coeficienți la necunoscute,

numit determinant de sistem.
Mai compunem trei determinanti astfel: inlocuim succesiv 1, 2 si 3 coloane in determinantul D cu o coloana de termeni liberi

Apoi putem demonstra următorul rezultat.
Teoremă (regula lui Cramer). Dacă determinantul sistemului este Δ ≠ 0, atunci sistemul luat în considerare are una și o singură soluție și
![]()
Dovada. Deci, luați în considerare un sistem de 3 ecuații cu trei necunoscute. Înmulțiți prima ecuație a sistemului cu complementul algebric A 11 element un 11, a 2-a ecuație - pe A21și al 3-lea - pe A 31:
Să adăugăm aceste ecuații:
Luați în considerare fiecare dintre paranteze și partea dreaptă a acestei ecuații. Prin teorema expansiunii determinantului în ceea ce privește elementele coloanei I
În mod similar, se poate demonstra că și .
În cele din urmă, este ușor să vezi asta 
Astfel, obținem egalitatea: .
Prin urmare, .
Egalitățile și sunt derivate în mod similar, de unde urmează afirmația teoremei.
Astfel, observăm că dacă determinantul sistemului este Δ ≠ 0, atunci sistemul are o soluție unică și invers. Dacă determinantul sistemului este egal cu zero, atunci sistemul fie are un set infinit de soluții, fie nu are soluții, adică. incompatibil.
Exemple. Rezolvați un sistem de ecuații

METODA GAUSS
Metodele considerate anterior pot fi folosite pentru a rezolva numai acele sisteme în care numărul de ecuații coincide cu numărul de necunoscute, iar determinantul sistemului trebuie să fie diferit de zero. Metoda Gaussiană este mai universală și este potrivită pentru sisteme cu orice număr de ecuații. Constă în eliminarea succesivă a necunoscutelor din ecuațiile sistemului.
Să considerăm din nou un sistem de trei ecuații cu trei necunoscute:
 .
.
Lăsăm prima ecuație neschimbată, iar din a 2-a și a 3-a excludem termenii care conțin x 1. Pentru a face acest lucru, împărțim a doua ecuație la A 21 și înmulțiți cu - A 11 și apoi se adună cu prima ecuație. În mod similar, împărțim a treia ecuație în A 31 și înmulțiți cu - A 11 și apoi adăugați-l la primul. Ca rezultat, sistemul original va lua forma:
Acum, din ultima ecuație, eliminăm termenul care conține x2. Pentru a face acest lucru, împărțiți a treia ecuație cu , înmulțiți cu și adăugați-o la a doua. Atunci vom avea un sistem de ecuații:

Prin urmare, din ultima ecuație este ușor de găsit x 3, apoi din a 2-a ecuație x2 si in sfarsit de la 1 - x 1.
Când se folosește metoda Gaussiană, ecuațiile pot fi schimbate dacă este necesar.
De multe ori, în loc să scrie sistem nou ecuațiile sunt limitate la scrierea matricei extinse a sistemului:

iar apoi aduceți-o într-o formă triunghiulară sau diagonală folosind transformări elementare.
LA transformări elementare matricele includ următoarele transformări:
- permutarea rândurilor sau coloanelor;
- înmulțirea unui șir cu un număr diferit de zero;
- adăugând la o linie alte linii.
Exemple: Rezolvarea sistemelor de ecuații folosind metoda Gauss.

Astfel, sistemul are un număr infinit de soluții.
Ecuațiile în general, ecuațiile algebrice liniare și sistemele lor, precum și metodele de rezolvare a acestora, ocupă un loc aparte în matematică, atât teoretică, cât și aplicată.
Acest lucru se datorează faptului că marea majoritate a problemelor fizice, economice, tehnice și chiar pedagogice pot fi descrise și rezolvate folosind o varietate de ecuații și sistemele acestora. Recent, a câștigat o popularitate deosebită printre cercetători, oameni de știință și practicieni modelare matematicăîn aproape toate domeniile, ceea ce se explică prin avantajele sale evidente față de alte metode binecunoscute și dovedite pentru studierea obiectelor de natură variată, în special, așa-numitele sisteme complexe. Există o mare varietate de definiții diferite ale unui model matematic dat de oamenii de știință în timpuri diferite, dar în opinia noastră, cea mai reușită este următoarea afirmație. Model matematic este o idee exprimată printr-o ecuație. Astfel, capacitatea de a compune și rezolva ecuații și sistemele acestora este o caracteristică integrală a unui specialist modern.
Pentru rezolvarea sistemelor de ecuații algebrice liniare, cele mai frecvent utilizate metode sunt: Cramer, Jordan-Gauss și metoda matricei.
Metoda soluției matriceale - o metodă de rezolvare a sistemelor de ecuații algebrice liniare cu un determinant diferit de zero folosind o matrice inversă.
Dacă scriem coeficienții pentru valorile necunoscute xi în matricea A, colectăm valorile necunoscute în vectorul coloana X și termenii liberi în vectorul coloana B, atunci sistemul de ecuații algebrice liniare poate fi scris în forma următoarei ecuații matriceale A X = B, care are o soluție unică numai atunci când determinantul matricei A nu este egal cu zero. În acest caz, soluția sistemului de ecuații poate fi găsită în felul următor X = A-1 · B, Unde A-1 - matrice inversă.
Metoda soluției matriceale este următoarea.
Fie dat un sistem de ecuații liniare cu n necunoscut:
Poate fi rescris sub formă de matrice: TOPOR = B, Unde A- matricea principală a sistemului, BȘi X- coloane de membri liberi și soluții ale sistemului, respectiv:

Înmulțiți această ecuație matriceală din stânga cu A-1 - matrice inversă matricei A: A -1 (TOPOR) = A -1 B
Deoarece A -1 A = E, primim X= A -1 B. Partea dreaptă a acestei ecuații va oferi o coloană de soluții sistemului original. Condiția de aplicabilitate pentru această metodă (precum și pentru existența unei soluții în general nu este sistem omogen ecuații liniare cu numărul de ecuații egal cu numărul de necunoscute) este nedegenerarea matricei A. O condiție necesară și suficientă pentru aceasta este ca determinantul matricei A: det A≠ 0.
Pentru un sistem omogen de ecuații liniare, adică atunci când vectorul B = 0 , într-adevăr regula opusă: sistemul TOPOR = 0 are o soluție non-trivială (adică non-zero) numai dacă det A= 0. O astfel de conexiune între soluțiile sistemelor omogene și neomogene de ecuații liniare se numește alternativa Fredholm.
Exemplu soluții ale unui sistem neomogen de ecuații algebrice liniare.

Să ne asigurăm că determinantul matricei, compus din coeficienții necunoscutelor sistemului de ecuații algebrice liniare, nu este egal cu zero.

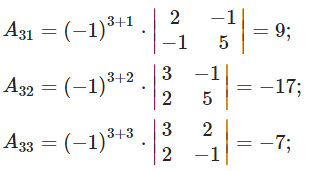
Următorul pas este de a calcula complementele algebrice pentru elementele matricei formate din coeficienții necunoscutelor. Ele vor fi necesare pentru a găsi matricea inversă.

Considera sistem de ecuații algebrice liniare(LENT) referitor la n necunoscut X 1 , X 2 , ..., X n :
Acest sistem într-o formă „pliată” poate fi scris după cum urmează:
S n i=1 A ij X j = b i , i=1,2, ..., n.
În conformitate cu regula înmulțirii matriceale, sistemul considerat de ecuații liniare poate fi scris în formă matriceală ax=b, Unde
 ,
,.
,
,.
Matrice A, ale căror coloane sunt coeficienții pentru necunoscutele corespunzătoare, iar rândurile sunt coeficienții pentru necunoscutele din ecuația corespunzătoare se numește matricea sistemului. matricea coloanei b, ale cărei elemente sunt părțile corecte ale ecuațiilor sistemului, se numește matricea părții drepte sau pur și simplu partea dreaptă a sistemului. matricea coloanei X , ale cărui elemente sunt necunoscute necunoscute, se numește soluție de sistem.
Sistemul de ecuații algebrice liniare scris ca ax=b, este ecuația matriceală.
Dacă matricea sistemului nedegenerat, atunci are o matrice inversă și apoi soluția sistemului ax=b este dat de formula:
x=A -1 b.
Exemplu Rezolvați sistemul  metoda matricei.
metoda matricei.
Soluţie găsiți matricea inversă pentru matricea coeficienților sistemului

Calculați determinantul prin extinderea pe primul rând:

Deoarece Δ ≠ 0 , Acea A -1 există.

Matricea inversă este găsită corect.
Să găsim o soluție la sistem 
Prin urmare, X 1 = 1, x 2 = 2, x 3 = 3 .
Examinare: 
7. Teorema Kronecker-Capelli privind compatibilitatea unui sistem de ecuații algebrice liniare.
Sistem de ecuații liniare se pare ca:
a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2 , (5.1)
a m1 x 1 + a m1 x 2 +... + a mn x n = b m .
Aici sunt date a i j și b i (i = ; j = ), iar x j sunt numere reale necunoscute. Folosind conceptul de produs de matrice, putem rescrie sistemul (5.1) sub forma:
unde A = (a i j) este matricea formată din coeficienții necunoscutelor sistemului (5.1), care se numește matricea sistemului, X = (x 1 , x 2 ,..., x n) T , B = (b 1 , b 2 ,..., b m) T - vectori coloană compuși respectiv din x j necunoscuți și termeni liberi b i .
Colectare comandată n numerele reale (c 1 , c 2 ,..., c n) se numesc soluție de sistem(5.1) dacă în urma înlocuirii acestor numere în locul variabilelor corespunzătoare x 1 , x 2 ,..., x n fiecare ecuație a sistemului se transformă într-o identitate aritmetică; cu alte cuvinte, dacă există un vector C= (c 1 , c 2 ,..., c n) T astfel încât AC B.
Sistemul (5.1) este numit comun, sau rezolvabil daca are cel putin o solutie. Sistemul este numit incompatibil, sau insolubil daca nu are solutii.
 ,
,
format prin atribuirea unei coloane de termeni liberi matricei A din dreapta, se numeste sistem de matrice extinsă.
Problema compatibilității sistemului (5.1) se rezolvă prin următoarea teoremă.
Teorema Kronecker-Capelli . Sistemul de ecuații liniare este consistent dacă și numai dacă rândurile matricelor A și A coincid, adică. r(A) = r(A) = r.
Pentru mulțimea M de soluții ale sistemului (5.1), există trei posibilități:
1) M = (în acest caz sistemul este inconsecvent);
2) M constă dintr-un element, adică sistemul are o soluție unică (în acest caz sistemul este numit anumit);
3) M este format din mai mult de un element (atunci sistemul este numit incert). În al treilea caz, sistemul (5.1) are un număr infinit de soluții.
Sistemul are o soluție unică numai dacă r(A) = n. În acest caz, numărul de ecuații nu este mai mic decât numărul de necunoscute (mn); dacă m>n, atunci m-n ecuații sunt consecințele celorlalți. Daca 0 Pentru a rezolva un sistem arbitrar de ecuații liniare, trebuie să fii capabil să rezolvi sisteme în care numărul de ecuații este egal cu numărul de necunoscute, așa-numitele Sisteme de tip Cramer: a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 , a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2 , (5.3) ...
... ... ...
... ... a n1 x 1 + a n1 x 2 +... + a nn x n = b n . Sistemele (5.3) se rezolvă în una din următoarele moduri: 1) prin metoda Gauss, sau prin metoda eliminării necunoscutelor; 2) după formulele lui Cramer; 3) prin metoda matricei. Exemplul 2.12. Investigați sistemul de ecuații și rezolvați-l dacă este compatibil: 5x 1 - x 2 + 2x 3 + x 4 = 7, 2x1 + x2 + 4x3 - 2x4 = 1, x 1 - 3x 2 - 6x 3 + 5x 4 = 0. Soluţie. Scriem matricea extinsă a sistemului:
Să calculăm rangul matricei principale a sistemului. Este evident că, de exemplu, minorul de ordinul doi din colțul din stânga sus = 7 0; minorii de ordinul trei care îl conțin sunt egali cu zero: Prin urmare, rangul matricei principale a sistemului este 2, i.e. r(A) = 2. Pentru a calcula rangul matricei extinse A, se consideră minorul limită prin urmare, rangul matricei extinse este r(A) = 3. Deoarece r(A) r(A), sistemul este inconsecvent. Utilizarea ecuațiilor este larg răspândită în viața noastră. Ele sunt folosite în multe calcule, construcție de structuri și chiar sport. Ecuațiile au fost folosite de om din cele mai vechi timpuri și de atunci utilizarea lor a crescut. Metoda matricei permite găsirea de soluții la SLAE (sistem de ecuații algebrice liniare) de orice complexitate. Întregul proces de rezolvare a SLAE se rezumă la doi pași principali: Determinarea matricei inverse pe baza matricei principale: Înmulțirea matricei inverse rezultate cu vectorul coloană de soluții. Să presupunem că ni se oferă un SLAE de următoarea formă: \[\left\(\begin(matrix) 5x_1 + 2x_2 & = & 7 \\ 2x_1 + x_2 & = & 9 \end(matrix)\right.\] Să începem să rezolvăm această ecuație scriind matricea sistemului: Matrice din partea dreaptă: Să definim o matrice inversă. Puteți găsi o matrice de ordinul 2 astfel: 1 - matricea în sine trebuie să fie nesingulară; 2 - elementele sale care se află pe diagonala principală sunt interschimbate, iar pentru elementele diagonalei secundare se efectuează o schimbare de semn spre opus, după care împărțim elementele obținute la determinantul matricei. Primim: \[\begin(pmatrix) 7 \\ 9 \end(pmatrix)=\begin(pmatrix) -11 \\ 31 \end(pmatrix)\Rightarrow \begin(pmatrix) x_1 \\ x_2 \end(pmatrix) =\ begin(pmatrix) -11 \\ 31 \end(pmatrix) \] 2 matrice sunt considerate egale dacă elementele lor corespunzătoare sunt egale. Ca rezultat, avem următorul răspuns al soluției SLAE: Puteți rezolva sistemul de ecuații pe site-ul nostru. Rezolvatorul online gratuit vă va permite să rezolvați o ecuație online de orice complexitate în câteva secunde. Tot ce trebuie să faci este să introduci datele în solutor. De asemenea, puteți afla cum să rezolvați ecuația pe site-ul nostru. Și dacă aveți întrebări, le puteți adresa în grupul nostru Vkontakte. .
.


Unde pot rezolva un sistem de ecuații folosind metoda matricei online?



