Algoritm pentru rezolvarea unui sistem de ecuații prin metoda Gauss. Metoda Gauss (excluderea succesivă a necunoscutelor)
Definirea și descrierea metodei Gauss
Metoda Transformării Gauss (cunoscută și sub denumirea de Metoda Transformării Gauss) excluderea secvenţială variabile necunoscute dintr-o ecuație sau matrice) pentru a rezolva sisteme ecuatii lineare este o metodă clasică de rezolvare a sistemului ecuații algebrice(SLAU). De asemenea, această metodă clasică este folosită pentru a rezolva probleme precum obținerea matrici inverseși determinarea rangului matricei.
Transformarea prin metoda Gauss constă în efectuarea unor mici modificări succesive (elementare) în sistemul de ecuații algebrice liniare, ducând la eliminarea variabilelor din acesta de sus în jos cu formarea unui nou sistem triunghiular de ecuații, care este echivalent cu cel original.
Definiția 1
Această parte a soluției se numește soluție Gaussiană înainte, deoarece întregul proces se desfășoară de sus în jos.
După aducerea sistemului original de ecuații la unul triunghiular, toate variabilele sistemului sunt găsite de jos în sus (adică primele variabile găsite sunt situate exact pe ultimele linii ale sistemului sau ale matricei). Această parte a soluției este cunoscută și ca soluție Gauss inversă. Algoritmul său constă în următoarele: mai întâi se calculează variabilele care sunt cel mai apropiate de partea de jos a sistemului de ecuații sau a unei matrice, apoi valorile obținute sunt înlocuite mai sus și astfel se găsește o altă variabilă și așa mai departe.
Descrierea algoritmului metodei Gauss
Secvența de acțiuni pentru rezolvarea generală a sistemului de ecuații prin metoda Gauss constă în aplicarea alternativă a curselor înainte și înapoi la matrice pe baza SLAE. Fie sistemul original de ecuații să aibă următoarea formă:
$\begin(cases) a_(11) \cdot x_1 +...+ a_(1n) \cdot x_n = b_1 \\ ... \\ a_(m1) \cdot x_1 + a_(mn) \cdot x_n = b_m \end(cazuri)$
Pentru a rezolva SLAE prin metoda Gauss, este necesar să scrieți sistemul inițial de ecuații sub forma unei matrice:
$A = \begin(pmatrix) a_(11) & … & a_(1n) \\ \vdots & … & \vdots \\ a_(m1) & … & a_(mn) \end(pmatrix)$, $b =\begin(pmatrix) b_1 \\ \vdots \\ b_m \end(pmatrix)$
Matricea $A$ se numește matricea principală și reprezintă coeficienții variabilelor scrise în ordine, iar $b$ se numește coloana termenilor săi liberi. Matricea $A$ scrisă prin linia cu o coloană de membri liberi se numește matrice augmentată:
$A = \begin(array)(ccc|c) a_(11) & … & a_(1n) & b_1 \\ \vdots & … & \vdots & ...\\ a_(m1) & … & a_( mn) & b_m \end(array)$
Acum, folosind transformări elementare peste sistemul de ecuații (sau peste matrice, după cum este mai convenabil), este necesar să o aducem la următoarea formă:
$\begin(cases) α_(1j_(1)) \cdot x_(j_(1)) + α_(1j_(2)) \cdot x_(j_(2))...+ α_(1j_(r)) \cdot x_(j_(r)) +... α_(1j_(n)) \cdot x_(j_(n)) = β_1 \\ α_(2j_(2)) \cdot x_(j_(2)). ..+ α_(2j_(r)) \cdot x_(j_(r)) +... α_(2j_(n)) \cdot x_(j_(n)) = β_2 \\ ...\\ α_( rj_(r)) \cdot x_(j_(r)) +... α_(rj_(n)) \cdot x_(j_(n)) = β_r \\ 0 = β_(r+1) \\ … \ \ 0 = β_m \end(cases)$ (1)
Matricea obținută din coeficienții sistemului transformat de ecuație (1) se numește matrice de etape, așa arată de obicei matricele de trepte:
$A = \begin(array)(ccc|c) a_(11) & a_(12) & a_(13) & b_1 \\ 0 & a_(22) & a_(23) & b_2\\ 0 & 0 & a_(33) și b_3 \end(array)$
Aceste matrici sunt caracterizate de următorul set de proprietăți:
- Toate rândurile sale zero vin după cele diferite de zero
- Dacă un rând al matricei cu indice $k$ este diferit de zero, atunci există mai puține zerouri în rândul anterior al aceleiași matrice decât în acest rând cu indice $k$.
După obținerea matricei de etape, este necesar să se substituie variabilele obținute în ecuațiile rămase (începând de la sfârșit) și să se obțină valorile rămase ale variabilelor.
Reguli de bază și transformări permise la utilizarea metodei Gauss
Atunci când simplificați o matrice sau un sistem de ecuații prin această metodă, trebuie utilizate numai transformări elementare.
Astfel de transformări sunt operații care pot fi aplicate unei matrice sau unui sistem de ecuații fără a-i schimba sensul:
- permutarea mai multor linii pe alocuri,
- adăugând sau scăzând dintr-o linie a matricei o altă linie din aceasta,
- înmulțirea sau împărțirea unui șir cu o constantă care nu este egală cu zero,
- o linie constând doar din zerouri, obținută în procesul de calcul și simplificare a sistemului, trebuie ștearsă,
- De asemenea, trebuie să eliminați liniile proporționale inutile, alegând pentru sistem singura cu coeficienți care sunt mai potrivite și mai convenabile pentru calcule ulterioare.
Toate transformările elementare sunt reversibile.
Analiza celor trei cazuri principale care apar la rezolvarea ecuațiilor liniare folosind metoda transformărilor simple Gaussiene
Există trei cazuri care apar atunci când se utilizează metoda Gauss pentru a rezolva sisteme:
- Când sistemul este inconsecvent, adică nu are soluții
- Sistemul de ecuații are o soluție și singura, iar numărul de rânduri și coloane diferite de zero din matrice este egal unul cu celălalt.
- Sistemul are un număr sau un set solutii posibile, iar numărul de rânduri din acesta este mai mic decât numărul de coloane.
Rezultatul soluției cu un sistem inconsecvent
Pentru această opțiune, la rezolvare ecuația matriceală metoda Gaussiană se caracterizează prin obţinerea unei linii cu imposibilitatea îndeplinirii egalităţii. Prin urmare, dacă apare cel puțin o egalitate incorectă, sistemele rezultat și original nu au soluții, indiferent de celelalte ecuații pe care le conțin. Un exemplu de matrice inconsistentă:
$\begin(array)(ccc|c) 2 & -1 & 3 & 0 \\ 1 & 0 & 2 & 0\\ 0 & 0 & 0 & 1 \end(array)$
În ultima linie a apărut o egalitate nesatisfăcută: $0 \cdot x_(31) + 0 \cdot x_(32) + 0 \cdot x_(33) = 1$.
Un sistem de ecuații care are o singură soluție
Datele sistemului după reducerea la o matrice în trepte și ștergerea rândurilor cu zerouri au același număr de rânduri și coloane în matricea principală. Iată un exemplu simplu de astfel de sistem:
$\begin(cases) x_1 - x_2 = -5 \\ 2 \cdot x_1 + x_2 = -7 \end(cases)$
Să o scriem sub forma unei matrice:
$\begin(array)(cc|c) 1 & -1 & -5 \\ 2 & 1 & -7 \end(array)$
Pentru a aduce prima celulă din al doilea rând la zero, înmulțiți rândul de sus cu $-2$ și scădeți-l din rândul de jos al matricei și lăsați rândul de sus în forma sa inițială, ca rezultat avem următoarele:
$\begin(array)(cc|c) 1 & -1 & -5 \\ 0 & 3 & 10 \end(array)$
Acest exemplu poate fi scris ca un sistem:
$\begin(cases) x_1 - x_2 = -5 \\ 3 \cdot x_2 = 10 \end(cases)$
Următoarea valoare a lui $x$ iese din ecuația inferioară: $x_2 = 3 \frac(1)(3)$. Înlocuind această valoare în ecuația superioară: $x_1 – 3 \frac(1)(3)$, obținem $x_1 = 1 \frac(2)(3)$.
Un sistem cu multe soluții posibile
Acest sistem se caracterizează printr-un număr mai mic de rânduri semnificative decât numărul de coloane din el (se iau în considerare rândurile matricei principale).
Variabilele într-un astfel de sistem sunt împărțite în două tipuri: de bază și gratuite. La convertirea unui astfel de sistem, variabilele principale conținute în acesta trebuie lăsate în zona din stânga până la semnul „=”, iar variabilele rămase trebuie transferate în partea dreapta egalitate.
Un astfel de sistem are doar câteva decizie comună.
Să analizăm următorul sistem de ecuații:
$\begin(cases) 2y_1 + 3y_2 + x_4 = 1 \\ 5y_3 - 4y_4 = 1 \end(cases)$
Să o scriem sub forma unei matrice:
$\begin(array)(cccc|c) 2 & 3 & 0 & 1 & 1 \\ 0 & 0 & 5 & 4 & 1 \\ \end(array)$
Sarcina noastră este să găsim o soluție generală pentru sistem. Pentru aceasta matrice, variabilele de baza vor fi $y_1$ si $y_3$ (pentru $y_1$ - deoarece este pe primul loc, iar in cazul lui $y_3$ - este situata dupa zerouri).
Ca variabile de bază, le alegem exact pe acelea care nu sunt egale cu zero primele din rând.
Variabilele rămase se numesc libere, prin ele trebuie să le exprimăm pe cele de bază.
Folosind așa-numita mișcare inversă, dezasamblam sistemul de jos în sus, pentru aceasta exprimăm mai întâi $y_3$ din linia de jos a sistemului:
$5y_3 – 4y_4 = 1$
$5y_3 = 4y_4 + 1$
$y_3 = \frac(4/5)y_4 + \frac(1)(5)$.
Acum înlocuim $y_3$ exprimat în ecuația superioară a sistemului $2y_1 + 3y_2 + y_4 = 1$: $2y_1 + 3y_2 - (\frac(4)(5)y_4 + \frac(1)(5)) + y_4 = 1$
Exprimăm $y_1$ în termeni de variabile libere $y_2$ și $y_4$:
$2y_1 + 3y_2 - \frac(4)(5)y_4 - \frac(1)(5) + y_4 = 1$
$2y_1 = 1 - 3y_2 + \frac(4)(5)y_4 + \frac(1)(5) - y_4$
$2y_1 = -3y_2 - \frac(1)(5)y_4 + \frac(6)(5)$
$y_1 = -1,5x_2 – 0,1y_4 + 0,6$
Decizia este gata.
Exemplul 1
Rezolvați nămolul folosind metoda Gaussiană. Exemple. Un exemplu de rezolvare a unui sistem de ecuații liniare dat de o matrice 3 cu 3 folosind metoda Gauss
$\begin(cases) 4x_1 + 2x_2 - x_3 = 1 \\ 5x_1 + 3x_2 - 2x^3 = 2\\ 3x_1 + 2x_2 - 3x_3 = 0 \end(cases)$
Scriem sistemul nostru sub forma unei matrice augmentate:
$\begin(array)(ccc|c) 4 & 2 & -1 & 1 \\ 5 & 3 & -2 & 2 \\ 3 & 2 & -3 & 0\\ \end(array)$
Acum, pentru comoditate și practic, trebuie să transformăm matricea astfel încât $1$ să fie în colțul de sus al ultimei coloane.
Pentru a face acest lucru, trebuie să adăugăm linia din mijloc înmulțită cu $-1$ la prima linie și să scriem linia din mijloc așa cum este, se dovedește:
$\begin(array)(ccc|c) -1 & -1 & 1 & -1 \\ 5 & 3 & -2 & 2 \\ 3 & 2 & -3 & 0\\ \end(array)$
$\begin(array)(ccc|c) -1 & -1 & 1 & -1 \\ 0 & -2 & 3 & -3 \\ 0 & -1 & 0 & -3\\ \end(array) $
Înmulțiți rândurile de sus și ultimul cu $-1$ și schimbați ultimul și cel din mijloc:
$\begin(array)(ccc|c) 1 & 1 & -1 & 1 \\ 0 & 1 & 0 & 3 \\ 0 & -2 & 3 & -3\\ \end(array)$
$\begin(array)(ccc|c) 1 & 1 & -1 & 1 \\ 0 & 1 & 0 & 3 \\ 0 & 0 & 3 & 3\\ \end(array)$
Și împărțiți ultima linie cu $3$:
$\begin(array)(ccc|c) 1 & 1 & -1 & 1 \\ 0 & 1 & 0 & 3 \\ 0 & 0 & 1 & 1\\ \end(array)$
Obținem următorul sistem de ecuații, echivalent cu cel inițial:
$\begin(cases) x_1 + x_2 – x_3 = 1\\ x_2 = 3 \\ x_3 = 1 \end(cases)$
Din ecuația superioară, exprimăm $x_1$:
$x1 = 1 + x_3 - x_2 = 1 + 1 - 3 = -1$.
Exemplul 2
Un exemplu de rezolvare a unui sistem definit folosind o matrice 4 cu 4 folosind metoda Gaussiană
$\begin(array)(cccc|c) 2 & 5 & 4 & 1 & 20 \\ 1 & 3 & 2 & 1 & 11 \\ 2 & 10 & 9 & 7 & 40\\ 3 & 8 & 9 & 2 și 37 \\ \end(array)$.
La început, schimbăm liniile de sus care îl urmează pentru a obține $1$ în colțul din stânga sus:
$\begin(array)(cccc|c) 1 & 3 & 2 & 1 & 11 \\ 2 & 5 & 4 & 1 & 20 \\ 2 & 10 & 9 & 7 & 40\\ 3 & 8 & 9 & 2 și 37 \\ \end(array)$.
Acum să înmulțim linia de sus cu $-2$ și să adăugăm la a doua și la a treia. La a 4-a adăugăm prima linie, înmulțită cu $-3$:
$\begin(array)(cccc|c) 1 & 3 & 2 & 1 & 11 \\ 0 & -1 & 0 & -1 & -2 \\ 0 & 4 & 5 & 5 & 18\\ 0 & - 1 & 3 & -1 & 4 \\ \end(array)$
Acum la rândul numărul 3 adăugăm linia 2 înmulțită cu $4$, iar la linia 4 adăugăm linia 2 înmulțită cu $-1$.
$\begin(array)(cccc|c) 1 & 3 & 2 & 1 & 11 \\ 0 & -1 & 0 & -1 & -2 \\ 0 & 0 & 5 & 1 & 10\\ 0 & 0 & 3 & 0 & 6 \\ \end(array)$
Înmulțiți rândul 2 cu $-1$, împărțiți rândul 4 cu $3$ și înlocuiți rândul 3.
$\begin(array)(cccc|c) 1 & 3 & 2 & 1 & 11 \\ 0 & 1 & 0 & 1 & 2 \\ 0 & 0 & 1 & 0 & 2\\ 0 & 0 & 5 & 1 și 10 \\ \end(array)$
Acum adăugăm la ultima linie penultima, înmulțită cu $-5$.
$\begin(array)(cccc|c) 1 & 3 & 2 & 1 & 11 \\ 0 & 1 & 0 & 1 & 2 \\ 0 & 0 & 1 & 0 & 2\\ 0 & 0 & 0 & 1 și 0 \\ \end(matrice)$
Rezolvăm sistemul de ecuații rezultat:
$\begin(cases) m = 0 \\ g = 2\\ y + m = 2\ \ x + 3y + 2g + m = 11\end(cases)$
Să fie dat un sistem de ecuații algebrice liniare, care trebuie rezolvat (găsiți astfel de valori ale necunoscutelor хi care transformă fiecare ecuație a sistemului într-o egalitate).
Știm că un sistem de ecuații algebrice liniare poate:
1) Nu au soluții (fi incompatibil).
2) Au infinit de soluții.
3) Aveți o soluție unică.
După cum ne amintim, regula lui Cramer și metoda matricei sunt nepotrivite în cazurile în care sistemul are infinite de soluții sau este inconsecvent. metoda Gauss – cel mai puternic și versatil instrument pentru găsirea de soluții la orice sistem de ecuații liniare, care în fiecare caz conduce-ne la raspuns! Algoritmul metodei în toate cele trei cazuri funcționează în același mod. Dacă metodele Cramer și matrice necesită cunoașterea determinanților, atunci aplicarea metodei Gauss necesită cunoașterea doar a operațiilor aritmetice, ceea ce o face accesibilă chiar și elevilor de școală primară.
Transformări matrice extinse ( aceasta este matricea sistemului - o matrice compusă numai din coeficienții necunoscutelor, plus o coloană de termeni liberi) sisteme de ecuații algebrice liniare în metoda Gauss:
1) Cu troky matrici poate sa rearanja locuri.
2) dacă există (sau sunt) rânduri proporționale (ca caz special - identice) în matrice, atunci urmează șterge din matrice, toate aceste rânduri cu excepția unuia.
3) dacă în matrice a apărut un rând zero în timpul transformărilor, atunci urmează și el șterge.
4) rândul matricei poate înmulțire (împărțire) la orice alt număr decât zero.
5) la rândul matricei, puteți adăugați un alt șir înmulțit cu un număr, diferit de zero.
În metoda Gauss, transformările elementare nu modifică soluția sistemului de ecuații.
Metoda Gauss constă din două etape:
- „Mișcare directă” - folosind transformări elementare, aduceți matricea extinsă a sistemului de ecuații algebrice liniare într-o formă în trepte „triunghiulară”: elementele matricei extinse situate sub diagonala principală sunt egale cu zero (deplasarea de sus în jos) ). De exemplu, la acest tip:
Pentru a face acest lucru, efectuați următorii pași:
1) Să considerăm prima ecuație a unui sistem de ecuații algebrice liniare și coeficientul la x 1 este egal cu K. A doua, a treia etc. transformăm ecuațiile astfel: împărțim fiecare ecuație (coeficienți pentru necunoscute, inclusiv termeni liberi) la coeficientul pentru necunoscut x 1, care se află în fiecare ecuație, și înmulțim cu K. După aceea, scădem prima din a doua ecuație ( coeficienţi pentru necunoscute şi termeni liberi). Obținem la x 1 în a doua ecuație coeficientul 0. Din a treia ecuație transformată scădem prima ecuație, deci până când toate ecuațiile cu excepția primei, cu necunoscut x 1, nu vor avea coeficient 0.
2) Treceți la următoarea ecuație. Fie aceasta a doua ecuație și coeficientul de la x 2 este egal cu M. Cu toate ecuațiile „subordonate”, procedăm așa cum este descris mai sus. Astfel, „sub” necunoscutul x 2 în toate ecuațiile vor fi zerouri.
3) Trecem la următoarea ecuație și așa mai departe până rămâne un ultim termen liber necunoscut și transformat.
- „Mișcarea inversă” a metodei Gauss este de a obține o soluție la un sistem de ecuații algebrice liniare (mișcarea „de jos în sus”). Din ultima ecuație „inferioară” obținem o primă soluție - necunoscuta x n. Pentru a face acest lucru, rezolvăm ecuația elementară A * x n \u003d B. În exemplul de mai sus, x 3 \u003d 4. Înlocuim valoarea găsită în următoarea ecuație „superioară” și o rezolvăm în raport cu următoarea necunoscută. De exemplu, x 2 - 4 \u003d 1, adică x 2 \u003d 5. Și așa mai departe până găsim toate necunoscutele.
Exemplu.
Rezolvăm sistemul de ecuații liniare folosind metoda Gauss, așa cum ne sfătuiesc unii autori:

Scriem matricea extinsă a sistemului și, folosind transformări elementare, o aducem la o formă de pas:

Ne uităm la „pasul” din stânga sus. Acolo ar trebui să avem o unitate. Problema este că nu sunt deloc nimeni în prima coloană, așa că nimic nu poate fi rezolvat prin rearanjarea rândurilor. În astfel de cazuri, unitatea trebuie organizată folosind transformare elementară. Acest lucru se poate face de obicei în mai multe moduri. Hai să o facem așa:
1 pas
. La prima linie adăugăm a doua linie, înmulțită cu -1. Adică am înmulțit mental a doua linie cu -1 și am efectuat adăugarea primei și a doua rânduri, în timp ce a doua linie nu s-a schimbat.

Acum în stânga sus „minus unu”, care ni se potrivește perfect. Cine vrea să obțină +1 poate efectua o acțiune suplimentară: înmulțiți prima linie cu -1 (schimbați-i semnul).
2 pas . Prima linie înmulțită cu 5 a fost adăugată la a doua linie, prima linie înmulțită cu 3 a fost adăugată la a treia linie.
3 pas . Prima linie a fost înmulțită cu -1, în principiu, aceasta este pentru frumusețe. S-a schimbat și semnul celei de-a treia rânduri și a fost mutat pe locul doi, astfel, la a doua „treaptă, am avut unitatea dorită.
4 pas . La a treia linie, adăugați a doua linie, înmulțită cu 2.
5 pas . A treia linie este împărțită la 3.
Un semn care indică o eroare în calcule (mai rar o greșeală de scriere) este un rezultat „proast”. Adică, dacă avem ceva de genul (0 0 11 | 23) mai jos și, în consecință, 11x 3 = 23, x 3 = 23/11, atunci cu un grad mare de probabilitate putem spune că a fost făcută o greșeală în timpul elementului transformări.
Efectuăm o mișcare inversă, în proiectarea exemplelor, sistemul în sine nu este adesea rescris, iar ecuațiile sunt „preluate direct din matricea dată”. Mișcarea inversă, vă reamintesc, funcționează „de jos în sus”. În acest exemplu, cadoul a rezultat:
x 3 = 1
x 2 = 3
x 1 + x 2 - x 3 \u003d 1, prin urmare x 1 + 3 - 1 \u003d 1, x 1 \u003d -1
Răspuns:x 1 \u003d -1, x 2 \u003d 3, x 3 \u003d 1.
Să rezolvăm același sistem folosind algoritmul propus. Primim
4 2 –1 1
5 3 –2 2
3 2 –3 0
Împărțim a doua ecuație cu 5 și a treia cu 3. Obținem:
4 2 –1 1
1 0.6 –0.4 0.4
1 0.66 –1 0
Înmulțind a doua și a treia ecuație cu 4, obținem:
4 2 –1 1
4 2,4 –1.6 1.6
4 2.64 –4 0
Scădeți prima ecuație din a doua și a treia ecuație, avem:
4 2 –1 1
0 0.4 –0.6 0.6
0 0.64 –3 –1
Împărțiți a treia ecuație la 0,64:
4 2 –1 1
0 0.4 –0.6 0.6
0 1 –4.6875 –1.5625
Înmulțiți a treia ecuație cu 0,4
4 2 –1 1
0 0.4 –0.6 0.6
0 0.4 –1.875 –0.625
Scădeți a doua ecuație din a treia ecuație, obținem matricea augmentată „în trepte”:
4 2 –1 1
0 0.4 –0.6 0.6
0 0 –1.275 –1.225
Astfel, deoarece o eroare acumulată în procesul de calcule, obținem x 3 \u003d 0,96, sau aproximativ 1.
x 2 \u003d 3 și x 1 \u003d -1.
Rezolvând astfel, nu te vei încurca niciodată în calcule și, în ciuda erorilor de calcul, vei obține rezultatul.
Această metodă de rezolvare a unui sistem de ecuații algebrice liniare este ușor de programat și nu ține cont de caracteristicile specifice ale coeficienților pentru necunoscute, deoarece în practică (în calculele economice și tehnice) trebuie să se ocupe de coeficienți neîntregi.
Iti doresc noroc! Ne vedem la ore! Tutor Dmitri Aistrakhanov.
site-ul, cu copierea integrală sau parțială a materialului, este necesară un link către sursă.
Continuăm să luăm în considerare sistemele de ecuații liniare. Această lecție este a treia pe această temă. Dacă aveți o idee vagă despre ce este un sistem de ecuații liniare în general, vă simțiți ca un ceainic, atunci vă recomand să începeți cu elementele de bază de la Pagina următoare, este util să studiați lecția.
Metoda Gauss este ușoară! De ce? Celebrul matematician german Johann Carl Friedrich Gauss, în timpul vieții, a primit recunoașterea drept cel mai mare matematician al tuturor timpurilor, un geniu și chiar porecla de „Regele matematicii”. Și totul ingenios, după cum știți, este simplu! Apropo, în bani cad în bani nu numai frații, ci și genii - portretul lui Gauss a fost etalat pe o bancnotă de 10 mărci germane (înainte de introducerea euro), iar Gauss încă le zâmbește misterios nemților din mărcile poștale obișnuite.
Metoda Gauss este simplă prin faptul că ESTE SUFICIENTĂ CUNOAȘTEREA UNUI ELEV DE CLASA A V-A pentru a o stăpâni. Trebuie să poată adăuga și înmulți! Nu întâmplător metoda eliminării succesive a necunoscutelor este adesea luată în considerare de profesorii de la opțiunile de matematică ale școlii. Este un paradox, dar metoda Gauss provoacă cele mai mari dificultăți studenților. Nimic surprinzător - totul este despre metodologie și voi încerca să povestesc într-o formă accesibilă despre algoritmul metodei.
În primul rând, sistematizăm puțin cunoștințele despre sistemele de ecuații liniare. Un sistem de ecuații liniare poate:
1) Aveți o soluție unică. 2) Au infinit de soluții. 3) Nu au soluții (fi incompatibil).
Metoda Gauss este cel mai puternic și versatil instrument pentru găsirea unei soluții orice sisteme de ecuații liniare. După cum ne amintim Regula lui Cramer și metoda matricei sunt nepotrivite în cazurile în care sistemul are infinit de soluții sau este inconsecvent. O metodă de eliminare succesivă a necunoscutelor oricum conduce-ne la raspuns! În această lecție, vom lua în considerare din nou metoda Gauss pentru cazul nr. 1 (singura soluție a sistemului), un articol este rezervat situațiilor de la punctele nr. 2-3. Observ că algoritmul metodei în sine funcționează în același mod în toate cele trei cazuri.
Înapoi la cel mai simplu sistem de la lecție Cum se rezolvă un sistem de ecuații liniare?și rezolvați-l folosind metoda Gaussiană.
Primul pas este să scrii sistem de matrice extinsă: . După ce principiu se înregistrează coeficienții, cred că toată lumea poate vedea. Linia verticală din interiorul matricei nu are nicio semnificație matematică - este doar un baraj pentru ușurință de proiectare.
Referinţă : Recomand să vă amintiți termeni algebră liniară. Matricea sistemului este o matrice compusă numai din coeficienți pentru necunoscute, în acest exemplu, matricea sistemului: . Matrice de sistem extinsă este aceeași matrice a sistemului plus o coloană de membri liberi, în acest caz: . Oricare dintre matrice poate fi numită pur și simplu o matrice pentru concizie.
După ce matricea extinsă a sistemului este scrisă, este necesar să se efectueze unele acțiuni cu aceasta, care sunt și numite transformări elementare.
Există următoarele transformări elementare:
1) Siruri de caractere matrici poate sa rearanja locuri. De exemplu, în matricea luată în considerare, puteți rearanja în siguranță primul și al doilea rând: 
2) Dacă există (sau au apărut) rânduri proporționale (ca caz special - identice) în matrice, atunci urmează șterge din matrice, toate aceste rânduri cu excepția unuia. Luați în considerare, de exemplu, matricea  . În această matrice, ultimele trei rânduri sunt proporționale, deci este suficient să lăsați doar unul dintre ele:
. În această matrice, ultimele trei rânduri sunt proporționale, deci este suficient să lăsați doar unul dintre ele:  .
.
3) Dacă în matrice a apărut un rând zero în timpul transformărilor, atunci urmează și acesta șterge. Nu voi desena, desigur, linia zero este linia în care doar zerouri.
4) Rândul matricei poate fi înmulțire (împărțire) pentru orice număr diferit de zero. Luați în considerare, de exemplu, matricea . Aici este recomandabil să împărțiți prima linie cu -3 și să înmulțiți a doua linie cu 2:  . Această acțiune este foarte utilă, deoarece simplifică transformările ulterioare ale matricei.
. Această acțiune este foarte utilă, deoarece simplifică transformările ulterioare ale matricei.
5) Această transformare provoacă cele mai multe dificultăți, dar de fapt nici nu este nimic complicat. La rândul matricei, puteți adăugați un alt șir înmulțit cu un număr, diferit de zero. Luați în considerare matricea noastră din studiu de caz: . În primul rând, voi descrie transformarea în detaliu. Înmulțiți primul rând cu -2:  , și la a doua linie adăugăm prima linie înmulțită cu -2:
, și la a doua linie adăugăm prima linie înmulțită cu -2:  . Acum prima linie poate fi împărțită „înapoi” cu -2: . După cum puteți vedea, linia care este ADAUGĂ LI – nu s-a schimbat. Mereu linia este schimbată, LA CARE SE ADAUGĂ UT.
. Acum prima linie poate fi împărțită „înapoi” cu -2: . După cum puteți vedea, linia care este ADAUGĂ LI – nu s-a schimbat. Mereu linia este schimbată, LA CARE SE ADAUGĂ UT.
În practică, desigur, ei nu pictează atât de detaliat, ci scriu mai scurt:  Încă o dată: la a doua linie a adăugat primul rând înmulțit cu -2. Linia este de obicei înmulțită oral sau pe o ciornă, în timp ce cursul mental al calculelor este cam așa:
Încă o dată: la a doua linie a adăugat primul rând înmulțit cu -2. Linia este de obicei înmulțită oral sau pe o ciornă, în timp ce cursul mental al calculelor este cam așa:
„Rescriu matricea și rescriu primul rând:  »
»
Prima coloană mai întâi. Mai jos trebuie să obțin zero. Prin urmare, înmulțesc unitatea de mai sus cu -2: și adaug prima la a doua linie: 2 + (-2) = 0. Scriu rezultatul în a doua linie:  »
»
„Acum a doua coloană. Peste -1 ori -2: . Adaug primul la a doua linie: 1 + 2 = 3. Scriu rezultatul pe a doua linie:  »
»
„Și a treia coloană. Peste -5 ori -2: . Adaug prima linie la a doua linie: -7 + 10 = 3. Scriu rezultatul pe a doua linie:  »
»
Vă rugăm să vă gândiți cu atenție la acest exemplu și să înțelegeți algoritmul de calcul secvenţial, dacă înțelegeți acest lucru, atunci metoda Gauss este practic „în buzunar”. Dar, desigur, încă lucrăm la această transformare.
Transformările elementare nu schimbă soluția sistemului de ecuații
! ATENŢIE: manipulări considerate Nu pot folosi, dacă vi se oferă o sarcină în care matricele sunt date „de la sine”. De exemplu, cu „clasic” matriciîn niciun caz nu trebuie să rearanjați ceva în interiorul matricelor! Să revenim la sistemul nostru. E practic ruptă în bucăți.
Să scriem matricea augmentată a sistemului și, folosind transformări elementare, să o reducem la vedere în trepte:

(1) Primul rând a fost adăugat celui de-al doilea rând, înmulțit cu -2. Și din nou: de ce înmulțim primul rând cu -2? Pentru a obține zero în partea de jos, ceea ce înseamnă a scăpa de o variabilă din a doua linie.
(2) Împărțiți al doilea rând la 3.
Scopul transformărilor elementare
–
convertiți matricea în formă de pas:  . În proiectarea sarcinii, ei desenează direct „scara” cu un creion simplu și, de asemenea, încercuiesc numerele care se află pe „trepte”. Termenul „vedere în trepte” în sine nu este în întregime teoretic; în literatura științifică și educațională, este adesea numit vedere trapezoidală sau vedere triunghiulară.
. În proiectarea sarcinii, ei desenează direct „scara” cu un creion simplu și, de asemenea, încercuiesc numerele care se află pe „trepte”. Termenul „vedere în trepte” în sine nu este în întregime teoretic; în literatura științifică și educațională, este adesea numit vedere trapezoidală sau vedere triunghiulară.
Ca urmare a unor transformări elementare, am obţinut echivalent sistemul original de ecuații:
Acum, sistemul trebuie să fie „destors” în direcția opusă - de jos în sus, acest proces este numit metoda Gauss inversă.
În ecuația inferioară, avem deja rezultatul final: .
Luați în considerare prima ecuație a sistemului și înlocuiți valoarea deja cunoscută a lui „y” în ea:
Să luăm în considerare cea mai comună situație, când metoda Gaussiană este necesară pentru a rezolva un sistem de trei ecuații liniare cu trei necunoscute.
Exemplul 1
Rezolvați sistemul de ecuații folosind metoda Gauss: 
Să scriem matricea augmentată a sistemului: 
Acum voi desena imediat rezultatul la care vom ajunge în cursul soluției: 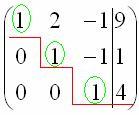 Și repet, scopul nostru este să aducem matricea într-o formă în trepte folosind transformări elementare. De unde să începeți să luați măsuri?
Și repet, scopul nostru este să aducem matricea într-o formă în trepte folosind transformări elementare. De unde să începeți să luați măsuri?
Mai întâi, uită-te la numărul din stânga sus:  Ar trebui să fie aproape întotdeauna aici unitate. În general, -1 (și uneori și alte numere) se potrivește, dar cumva s-a întâmplat în mod tradițional ca o unitate să fie de obicei plasată acolo. Cum se organizează o unitate? Ne uităm la prima coloană - avem o unitate terminată! Transformarea unu: schimbați prima și a treia linie:
Ar trebui să fie aproape întotdeauna aici unitate. În general, -1 (și uneori și alte numere) se potrivește, dar cumva s-a întâmplat în mod tradițional ca o unitate să fie de obicei plasată acolo. Cum se organizează o unitate? Ne uităm la prima coloană - avem o unitate terminată! Transformarea unu: schimbați prima și a treia linie: 
Acum prima linie va rămâne neschimbată până la sfârșitul soluției. Acum bine.
Unitatea din stânga sus este organizată. Acum trebuie să obțineți zerouri în aceste locuri: 
Zerourile se obțin doar cu ajutorul unei transformări „dificile”. În primul rând, ne ocupăm de a doua linie (2, -1, 3, 13). Ce trebuie făcut pentru a obține zero în prima poziție? Trebuie sa la a doua linie se adaugă prima linie înmulțită cu -2. Mental sau pe ciornă, înmulțim prima linie cu -2: (-2, -4, 2, -18). Și efectuăm în mod constant (din nou mental sau pe o schiță) adăugare, la a doua linie adăugăm prima linie, deja înmulțită cu -2:

Rezultatul este scris pe a doua linie: 
În mod similar, avem de-a face cu a treia linie (3, 2, -5, -1). Pentru a obține zero în prima poziție, aveți nevoie la a treia linie se adaugă prima linie înmulțită cu -3. Mental sau pe ciornă, înmulțim prima linie cu -3: (-3, -6, 3, -27). Și la a treia linie adăugăm prima linie înmulțită cu -3:

Rezultatul este scris pe a treia linie:
În practică, aceste acțiuni sunt de obicei efectuate verbal și scrise într-un singur pas: 
Nu este nevoie să numărați totul deodată și în același timp. Ordinea calculelor și „inserarea” rezultatelor consistentși, de obicei, așa: mai întâi rescriem prima linie și ne umflam în liniște - CONSECUT și ATENT:
 Și am luat deja în considerare cursul mental al calculelor de mai sus.
Și am luat deja în considerare cursul mental al calculelor de mai sus.
În acest exemplu, acest lucru este ușor de făcut, împărțim a doua linie la -5 (deoarece toate numerele de acolo sunt divizibile cu 5 fără rest). În același timp, împărțim a treia linie la -2, deoarece cu cât numărul este mai mic, cu atât soluția este mai simplă:
În etapa finală a transformărilor elementare, trebuie să se obțină încă un zero aici: 
Pentru aceasta la a treia linie adăugăm a doua linie, înmulțită cu -2:
 Încercați să analizați singur această acțiune - înmulțiți mental a doua linie cu -2 și efectuați adunarea.
Încercați să analizați singur această acțiune - înmulțiți mental a doua linie cu -2 și efectuați adunarea.
Ultima acțiune efectuată este coafura rezultatului, împărțiți a treia linie la 3.
Ca rezultat al transformărilor elementare, s-a obținut un sistem inițial echivalent de ecuații liniare:  Rece.
Rece.
Acum intră în joc cursul invers al metodei gaussiene. Ecuațiile se „desfășoară” de jos în sus.
În a treia ecuație, avem deja rezultatul final:
Să ne uităm la a doua ecuație: . Semnificația lui „z” este deja cunoscută, astfel:
Și în sfârșit, prima ecuație: . „Y” și „Z” sunt cunoscute, problema este mică:
Răspuns: ![]()
După cum s-a remarcat în mod repetat, pentru orice sistem de ecuații, este posibil și necesar să se verifice soluția găsită, din fericire, aceasta nu este dificilă și rapidă.
Exemplul 2

Acesta este un exemplu de auto-rezolvare, o mostră de finisare și un răspuns la sfârșitul lecției.
Trebuie remarcat faptul că dvs curs de acțiune poate să nu coincidă cu cursul meu de acțiune, și aceasta este o caracteristică a metodei Gauss. Dar răspunsurile trebuie să fie aceleași!
Exemplul 3
Rezolvați un sistem de ecuații liniare folosind metoda Gauss 
Ne uităm la „pasul” din stânga sus. Acolo ar trebui să avem o unitate. Problema este că nu sunt deloc nimeni în prima coloană, așa că nimic nu poate fi rezolvat prin rearanjarea rândurilor. În astfel de cazuri, unitatea trebuie organizată folosind o transformare elementară. Acest lucru se poate face de obicei în mai multe moduri. Am facut asta: (1) La prima linie adăugăm a doua linie, înmulțită cu -1. Adică am înmulțit mental a doua linie cu -1 și am efectuat adăugarea primei și a doua rânduri, în timp ce a doua linie nu s-a schimbat.

Acum în stânga sus „minus unu”, care ni se potrivește perfect. Cine vrea să obțină +1 poate efectua un gest suplimentar: înmulțiți prima linie cu -1 (schimbați-i semnul).
(2) Primul rând înmulțit cu 5 a fost adăugat celui de-al doilea rând, primul rând înmulțit cu 3 a fost adăugat celui de-al treilea rând.
(3) Prima linie a fost înmulțită cu -1, în principiu, aceasta este pentru frumusețe. S-a schimbat și semnul celei de-a treia rânduri și a fost mutat pe locul doi, astfel, la a doua „treaptă, am avut unitatea dorită.
(4) A doua linie înmulțită cu 2 a fost adăugată la a treia linie.
(5) Al treilea rând a fost împărțit la 3.
Un semn rău care indică o eroare de calcul (mai rar o greșeală de scriere) este un rezultat „reu”. Adică, dacă avem ceva ca mai jos și, în consecință, ![]() , apoi cu un grad mare de probabilitate se poate susține că s-a făcut o eroare în cursul transformărilor elementare.
, apoi cu un grad mare de probabilitate se poate susține că s-a făcut o eroare în cursul transformărilor elementare.
Încărcăm mișcarea inversă, în proiectarea exemplelor, sistemul în sine nu este adesea rescris, iar ecuațiile sunt „preluate direct din matricea dată”. Mișcarea inversă, vă reamintesc, funcționează de jos în sus. Da, iată un cadou:
Răspuns: ![]() .
.
Exemplul 4
Rezolvați un sistem de ecuații liniare folosind metoda Gauss 
Acesta este un exemplu pentru o soluție independentă, este ceva mai complicat. Este în regulă dacă cineva se încurcă. Soluție completă și eșantion de proiectare la sfârșitul lecției. Soluția ta poate diferi de a mea.
În ultima parte, luăm în considerare câteva caracteristici ale algoritmului Gauss. Prima caracteristică este că uneori unele variabile lipsesc din ecuațiile sistemului, de exemplu:  Cum se scrie corect matricea augmentată a sistemului? Am vorbit deja despre acest moment în lecție. regula lui Cramer. Metoda matricei. În matricea extinsă a sistemului, punem zerouri în locul variabilelor lipsă:
Cum se scrie corect matricea augmentată a sistemului? Am vorbit deja despre acest moment în lecție. regula lui Cramer. Metoda matricei. În matricea extinsă a sistemului, punem zerouri în locul variabilelor lipsă:  Apropo, acesta este un exemplu destul de ușor, deoarece există deja un zero în prima coloană și sunt mai puține transformări elementare de efectuat.
Apropo, acesta este un exemplu destul de ușor, deoarece există deja un zero în prima coloană și sunt mai puține transformări elementare de efectuat.
A doua caracteristică este aceasta. În toate exemplele luate în considerare, am plasat fie –1, fie +1 pe „trepte”. Ar putea fi alte numere? În unele cazuri pot. Luați în considerare sistemul:  .
.
Aici, în „treapta” din stânga sus avem un deuce. Dar observăm faptul că toate numerele din prima coloană sunt divizibile cu 2 fără rest - și alte două și șase. Iar zeul din stânga sus ni se va potrivi! La primul pas, trebuie să efectuați următoarele transformări: adăugați prima linie înmulțită cu -1 la a doua linie; la a treia linie se adaugă prima linie înmulțită cu -3. Astfel, vom obține zerourile dorite în prima coloană.
Sau altfel așa exemplu condițional:  . Aici, triplul de pe al doilea „trep” ni se potrivește și el, deoarece 12 (locul în care trebuie să obținem zero) este divizibil cu 3 fără rest. Este necesar să se efectueze următoarea transformare: la a treia linie, se adaugă a doua linie, înmulțită cu -4, în urma căreia se va obține zeroul de care avem nevoie.
. Aici, triplul de pe al doilea „trep” ni se potrivește și el, deoarece 12 (locul în care trebuie să obținem zero) este divizibil cu 3 fără rest. Este necesar să se efectueze următoarea transformare: la a treia linie, se adaugă a doua linie, înmulțită cu -4, în urma căreia se va obține zeroul de care avem nevoie.
Metoda Gauss este universală, dar există o particularitate. Învățați cu încredere să rezolvați sisteme prin alte metode (metoda lui Cramer, metoda matricei) poate fi literalmente prima dată - există un algoritm foarte strict. Dar pentru a vă simți încrezători în metoda Gauss, ar trebui să vă „umpleți mâna” și să rezolvați cel puțin 5-10 zece sisteme. Prin urmare, la început pot exista confuzii, erori în calcule și nu este nimic neobișnuit sau tragic în asta.
Vreme ploioasă de toamnă în afara ferestrei.... Prin urmare, pentru toată lumea mai mult exemplu complex pentru soluție independentă:
Exemplul 5
Rezolvați un sistem de 4 ecuații liniare cu patru necunoscute folosind metoda Gauss. 
O astfel de sarcină în practică nu este atât de rară. Cred că până și un ceainic care a studiat această pagină în detaliu înțelege algoritmul pentru rezolvarea unui astfel de sistem în mod intuitiv. Practic la fel - doar mai multă acțiune.
Cazurile în care sistemul nu are soluții (inconsecvente) sau are infinit de soluții sunt luate în considerare în lecție. Sisteme incompatibile și sisteme cu o soluție comună. Acolo puteți repara algoritmul considerat al metodei Gauss.
Iti doresc noroc!
Solutii si raspunsuri:
Exemplul 2:
Decizie
:
Să notăm matricea extinsă a sistemului și, folosind transformări elementare, să o aducem într-o formă în trepte.
 Transformări elementare efectuate:
(1) Primul rând a fost adăugat celui de-al doilea rând, înmulțit cu -2. Prima linie a fost adăugată la a treia linie, înmulțită cu -1.
Atenţie!
Aici poate fi tentant să scădem prima din a treia linie, nu recomand insistent scăderea - riscul de eroare crește foarte mult. Doar ne pliăm!
(2) Semnul celei de-a doua rânduri a fost schimbat (înmulțit cu -1). A doua și a treia linie au fost schimbate.
Notă
că pe „trepte” ne mulțumim nu numai cu unul, ci și cu -1, ceea ce este și mai convenabil.
(3) La a treia linie, adăugați a doua linie, înmulțită cu 5.
(4) Semnul celei de-a doua linii a fost schimbat (înmulțit cu -1). A treia linie a fost împărțită la 14.
Transformări elementare efectuate:
(1) Primul rând a fost adăugat celui de-al doilea rând, înmulțit cu -2. Prima linie a fost adăugată la a treia linie, înmulțită cu -1.
Atenţie!
Aici poate fi tentant să scădem prima din a treia linie, nu recomand insistent scăderea - riscul de eroare crește foarte mult. Doar ne pliăm!
(2) Semnul celei de-a doua rânduri a fost schimbat (înmulțit cu -1). A doua și a treia linie au fost schimbate.
Notă
că pe „trepte” ne mulțumim nu numai cu unul, ci și cu -1, ceea ce este și mai convenabil.
(3) La a treia linie, adăugați a doua linie, înmulțită cu 5.
(4) Semnul celei de-a doua linii a fost schimbat (înmulțit cu -1). A treia linie a fost împărțită la 14.
Mișcare inversă:
Răspuns
:
![]() .
.
Exemplul 4:
Decizie
:
Scriem matricea extinsă a sistemului și, folosind transformări elementare, o aducem la o formă de pas:

Conversii efectuate: (1) A doua linie a fost adăugată la prima linie. Astfel, unitatea dorită este organizată în „treapta” din stânga sus. (2) Primul rând înmulțit cu 7 a fost adăugat celui de-al doilea rând, primul rând înmulțit cu 6 a fost adăugat celui de-al treilea rând.
Cu al doilea „pas” totul este mai rău , „candidații” pentru acesta sunt numerele 17 și 23 și avem nevoie fie de unul, fie de -1. Transformările (3) și (4) vor avea ca scop obținerea unității dorite (3) A doua linie a fost adăugată la a treia linie, înmulțită cu -1. (4) A treia linie, înmulțită cu -3, a fost adăugată la a doua linie. Lucrul necesar de pe a doua treaptă este primit . (5) La al treilea rând se adaugă al doilea, înmulțit cu 6. (6) Al doilea rând a fost înmulțit cu -1, al treilea rând a fost împărțit cu -83.
Mișcare inversă:
Răspuns :
Exemplul 5:
Decizie
:
Să notăm matricea sistemului și, folosind transformări elementare, să o aducem într-o formă treptat:


Conversii efectuate: (1) Prima și a doua linie au fost schimbate. (2) Primul rând a fost adăugat celui de-al doilea rând, înmulțit cu -2. Prima linie a fost adăugată la a treia linie, înmulțită cu -2. Prima linie a fost adăugată la a patra linie, înmulțită cu -3. (3) A doua linie înmulțită cu 4 a fost adăugată la a treia linie, a doua linie înmulțită cu -1 a fost adăugată la a patra linie. (4) Semnul celui de-al doilea rând a fost schimbat. A patra linie a fost împărțită la 3 și plasată în locul celei de-a treia linie. (5) A treia linie a fost adăugată la a patra linie, înmulțită cu -5.
Mișcare inversă:
![]()
Răspuns :
Metoda Gauss, numită și metoda eliminării succesive a necunoscutelor, constă în următoarele. Folosind transformări elementare, sistemul de ecuații liniare este adus într-o astfel de formă încât matricea sa de coeficienți se dovedește a fi trapezoidal (la fel ca triunghiular sau în trepte) sau aproape de trapezoidal (cursul direct al metodei Gauss, atunci - doar o mișcare directă). Un exemplu de astfel de sistem și soluția acestuia sunt prezentate în figura de mai sus.
Într-un astfel de sistem, ultima ecuație conține o singură variabilă și valoarea acesteia poate fi găsită în mod unic. Apoi valoarea acestei variabile este înlocuită în ecuația anterioară ( Revers gaussian , apoi - doar o mișcare inversă), din care se găsește variabila anterioară și așa mai departe.
Într-un sistem trapezoidal (triunghiular), după cum vedem, a treia ecuație nu mai conține variabile yși X, iar a doua ecuație - variabilă X .
După ce matricea sistemului a luat o formă trapezoidală, nu mai este dificil să rezolvați problema compatibilității sistemului, să determinați numărul de soluții și să găsiți soluțiile în sine.
Avantajele metodei:
- la rezolvarea sistemelor de ecuații liniare cu mai mult de trei ecuații și necunoscute, metoda Gauss nu este la fel de greoaie ca metoda Cramer, deoarece sunt necesare mai puține calcule la rezolvarea metodei Gauss;
- folosind metoda Gauss, poți rezolva sisteme nedefinite de ecuații liniare, adică având o soluție comună (și le vom analiza în această lecție), iar folosind metoda Cramer, poți afirma doar că sistemul este incert;
- poți rezolva sisteme de ecuații liniare în care numărul de necunoscute nu este egal cu numărul de ecuații (le vom analiza și în această lecție);
- metoda se bazează pe metode elementare (școlare) - metoda de substituire a necunoscutelor și metoda de adunare a ecuațiilor, pe care am atins-o în articolul corespunzător.
Pentru ca toată lumea să fie impregnată de simplitatea cu care se rezolvă sistemele de ecuații liniare trapezoidale (triunghiulare, trepte), prezentăm soluția unui astfel de sistem folosind cursa inversă. O soluție rapidă la acest sistem a fost prezentată în imaginea de la începutul lecției.
Exemplul 1 Rezolvați un sistem de ecuații liniare folosind mișcarea inversă:

Decizie. În acest sistem trapezoidal, variabila z se găsește în mod unic din a treia ecuație. Inlocuim valoarea acesteia in a doua ecuatie si obtinem valoarea variabilei y:
Acum știm valorile a două variabile - zși y. Le înlocuim în prima ecuație și obținem valoarea variabilei X:
Din pașii anteriori, scriem soluția sistemului de ecuații:
![]()
Pentru a obține un astfel de sistem trapezoidal de ecuații liniare, pe care l-am rezolvat foarte simplu, este necesară aplicarea unei mișcări directe asociate transformărilor elementare ale sistemului de ecuații liniare. De asemenea, nu este foarte greu.
Transformări elementare ale unui sistem de ecuații liniare
Repetând metoda școlară de adunare algebrică a ecuațiilor sistemului, am aflat că la una dintre ecuațiile sistemului se poate adăuga o altă ecuație a sistemului, iar fiecare dintre ecuații poate fi înmulțită cu câteva numere. Ca rezultat, obținem un sistem de ecuații liniare echivalent cu cel dat. În ea, o ecuație conținea deja o singură variabilă, înlocuind valoarea căreia în alte ecuații, ajungem la o soluție. O astfel de adăugare este unul dintre tipurile de transformare elementară a sistemului. Când folosim metoda Gauss, putem folosi mai multe tipuri de transformări.

Animația de mai sus arată cum sistemul de ecuații se transformă treptat într-unul trapezoidal. Adică, cel pe care l-ați văzut la prima animație și v-ați asigurat că este ușor să găsiți valorile tuturor necunoscutelor din ea. Cum să efectuați o astfel de transformare și, desigur, exemple, vor fi discutate în continuare.
La rezolvarea sistemelor de ecuații liniare cu orice număr de ecuații și necunoscute în sistemul de ecuații și în matricea extinsă a sistemului poate sa:
- linii de schimb (acesta a fost menționat chiar la începutul acestui articol);
- dacă în urma altor transformări au apărut linii egale sau proporționale, acestea pot fi șterse, cu excepția uneia;
- ștergeți rândurile „nule”, unde toți coeficienții sunt egali cu zero;
- înmulțiți sau împărțiți orice șir cu un număr;
- adăugați la orice linie o altă linie înmulțită cu un număr.
În urma transformărilor, obținem un sistem de ecuații liniare echivalent cu cel dat.
Algoritm și exemple de rezolvare prin metoda Gauss a unui sistem de ecuații liniare cu o matrice pătrată a sistemului
Luați în considerare mai întâi soluția sistemelor de ecuații liniare în care numărul de necunoscute este egal cu numărul de ecuații. Matricea unui astfel de sistem este pătrată, adică numărul de rânduri din acesta este egal cu numărul de coloane.
Exemplul 2 Rezolvați un sistem de ecuații liniare folosind metoda Gauss

Rezolvând sisteme de ecuații liniare folosind metode școlare, am înmulțit termen cu termen una dintre ecuații cu un anumit număr, astfel încât coeficienții primei variabile din cele două ecuații să fie numere opuse. Când se adună ecuații, această variabilă este eliminată. Metoda Gauss funcționează într-un mod similar.
A simplifica aspect solutii compune matricea augmentată a sistemului:
În această matrice, coeficienții necunoscutelor sunt situați în stânga înaintea barei verticale, iar membrii liberi sunt în dreapta după bara verticală.
Pentru comoditatea împărțirii coeficienților variabilelor (pentru a obține o împărțire la unu) schimbați primul și al doilea rând din matricea sistemului. Obținem un sistem echivalent cu cel dat, deoarece în sistemul de ecuații liniare se pot rearanja ecuațiile:

Cu noua prima ecuație elimina variabila X din a doua și din toate ecuațiile ulterioare. Pentru a face acest lucru, adăugați primul rând înmulțit cu (în cazul nostru cu ) la al doilea rând al matricei, iar primul rând înmulțit cu (în cazul nostru cu ) la al treilea rând.
Acest lucru este posibil pentru că
Dacă au existat mai mult de trei ecuații în sistemul nostru, atunci prima linie ar trebui adăugată la toate ecuațiile ulterioare, înmulțită cu raportul coeficienților corespunzători, luați cu semnul minus.
Ca rezultat, obținem o matrice echivalentă cu sistemul dat sistem nou ecuații, în care toate ecuațiile, începând cu a doua nu conțin o variabilă X :

Pentru a simplifica al doilea rând al sistemului rezultat, îl înmulțim cu și obținem din nou matricea sistemului de ecuații echivalent cu acest sistem:

Acum, păstrând prima ecuație a sistemului rezultat neschimbată, folosind a doua ecuație, eliminăm variabila y din toate ecuațiile ulterioare. Pentru a face acest lucru, adăugați al doilea rând înmulțit cu (în cazul nostru, cu ) la al treilea rând al matricei sistemului.
Dacă au existat mai mult de trei ecuații în sistemul nostru, atunci a doua linie ar trebui adăugată la toate ecuațiile ulterioare, înmulțită cu raportul coeficienților corespunzători, luați cu semnul minus.
Ca rezultat, obținem din nou matricea sistemului echivalent cu sistemul dat de ecuații liniare:
Am obținut un sistem trapezoidal de ecuații liniare echivalent cu cel dat:

Dacă numărul de ecuații și variabile este mai mare decât în exemplul nostru, atunci procesul de eliminare secvențială a variabilelor continuă până când matricea sistemului devine trapezoidală, ca în exemplul nostru demonstrativ.
Vom găsi soluția „de la capăt” - invers. Pentru aceasta din ultima ecuație pe care o determinăm z:
.
Înlocuind această valoare în ecuația anterioară, găsi y:
Din prima ecuație găsi X:
![]()
Răspuns: soluția acestui sistem de ecuații - ![]() .
.
: în acest caz, același răspuns va fi dat dacă sistemul are o soluție unică. Dacă sistemul are un număr infinit de soluții, atunci va fi și răspunsul, iar acesta este subiectul celei de-a cincea părți a acestei lecții.
Rezolvați singur un sistem de ecuații liniare folosind metoda Gauss și apoi uitați-vă la soluție
În fața noastră este din nou un exemplu de sistem consistent și definit de ecuații liniare, în care numărul de ecuații este egal cu numărul de necunoscute. Diferența față de exemplul nostru demonstrativ de la algoritm este că există deja patru ecuații și patru necunoscute.
Exemplul 4 Rezolvați un sistem de ecuații liniare folosind metoda Gauss:

Acum trebuie să utilizați a doua ecuație pentru a exclude variabila din ecuațiile ulterioare. Să facem niște lucrări pregătitoare. Pentru a face mai convenabil raportul dintre coeficienți, trebuie să obțineți o unitate în a doua coloană a celui de-al doilea rând. Pentru a face acest lucru, scădeți al treilea rând din al doilea rând și înmulțiți al doilea rând rezultat cu -1.
Să efectuăm acum eliminarea efectivă a variabilei din a treia și a patra ecuație. Pentru a face acest lucru, adăugați al doilea, înmulțit cu , la a treia linie, iar al doilea, înmulțit cu , la a patra.

Acum, folosind a treia ecuație, eliminăm variabila din a patra ecuație. Pentru a face acest lucru, la a patra linie, adăugați a treia, înmulțit cu . Obținem o matrice extinsă de formă trapezoidală.

Am obținut un sistem de ecuații, care este echivalent cu acest sistem:

Prin urmare, sistemele rezultate și date sunt consistente și definite. Găsim soluția finală „de la capăt”. Din a patra ecuație, putem exprima direct valoarea variabilei „x patrulea”:
Inlocuim aceasta valoare in a treia ecuatie a sistemului si obtinem
![]() ,
,
![]() ,
,
În sfârșit, înlocuirea valorii
În prima ecuație dă
![]() ,
,
unde găsim "x primul":
Răspuns: Acest sistem de ecuații are o soluție unică. ![]() .
.
De asemenea, puteți verifica soluția sistemului pe un calculator care rezolvă prin metoda lui Cramer: în acest caz, același răspuns va fi dat dacă sistemul are o soluție unică.
Rezolvarea prin metoda Gauss a problemelor aplicate pe exemplul unei probleme pentru aliaje
Sistemele de ecuații liniare sunt folosite pentru a modela obiecte reale ale lumii fizice. Să rezolvăm una dintre aceste probleme - pentru aliaje. Sarcini similare - sarcini pe un amestec, cost sau gravitație specifică bunuri individuale într-un grup de mărfuri și altele asemenea.
Exemplul 5 Trei bucăți de aliaj au o masă totală de 150 kg. Primul aliaj conține 60% cupru, al doilea - 30%, al treilea - 10%. În același timp, în al doilea și al treilea aliaj luate împreună, cuprul este cu 28,4 kg mai puțin decât în primul aliaj, iar în al treilea aliaj, cuprul este cu 6,2 kg mai puțin decât în al doilea. Aflați masa fiecărei piese de aliaj.
Decizie. Compunem un sistem de ecuații liniare:
Înmulțind a doua și a treia ecuație cu 10, obținem un sistem echivalent de ecuații liniare:
Compunem matricea extinsă a sistemului:
Atenție, mișcare directă. Adunând (în cazul nostru, scăzând) un rând, înmulțit cu un număr (se aplică de două ori), cu matricea extinsă a sistemului au loc următoarele transformări:

Cursa dreaptă s-a încheiat. Am obținut o matrice extinsă de formă trapezoidală.
Să folosim inversul. Găsim o soluție de la final. Noi vedem asta .
Din a doua ecuație găsim
Din a treia ecuație -
De asemenea, puteți verifica soluția sistemului pe un calculator care rezolvă prin metoda lui Cramer: în acest caz, același răspuns va fi dat dacă sistemul are o soluție unică.
Simplitatea metodei Gauss este dovedită de faptul că matematicianul german Carl Friedrich Gauss i-a luat doar 15 minute pentru ao inventa. Pe lângă metoda numelui său, din opera lui Gauss, zicala „Nu ar trebui să amestecăm ceea ce ni se pare incredibil și nefiresc cu absolut imposibil” este un fel de instructie scurta pentru a face descoperiri.
În multe probleme aplicate, poate să nu existe o a treia restricție, adică o a treia ecuație, atunci este necesar să se rezolve un sistem de două ecuații cu trei necunoscute folosind metoda Gauss sau, dimpotrivă, există mai puține necunoscute decât ecuații. Acum începem să rezolvăm astfel de sisteme de ecuații.
Folosind metoda Gauss, puteți determina dacă orice sistem este consecvent sau inconsecvent n ecuații liniare cu n variabile.
Metoda Gauss și sisteme de ecuații liniare cu un număr infinit de soluții
Următorul exemplu este un sistem consistent, dar nedefinit de ecuații liniare, adică are un număr infinit de soluții.
După efectuarea transformărilor în matricea extinsă a sistemului (permutarea rândurilor, înmulțirea și împărțirea rândurilor cu un anumit număr, adăugarea unui rând la altul), rânduri de formă
Dacă în toate ecuaţiile având forma
Membrii liberi sunt egali cu zero, asta înseamnă că sistemul este nedefinit, adică are un număr infinit de soluții, iar ecuațiile de acest tip sunt „de prisos” și sunt excluse din sistem.
Exemplul 6
Decizie. Să compunem matricea extinsă a sistemului. Apoi, folosind prima ecuație, eliminăm variabila din ecuațiile ulterioare. Pentru a face acest lucru, la al doilea, al treilea și al patrulea rând, adăugați primul, înmulțit cu , respectiv:

Acum să adăugăm al doilea rând la al treilea și al patrulea rând.

Ca urmare, ajungem la sistem

Ultimele două ecuații au devenit ecuații de forma . Aceste ecuații sunt satisfăcute pentru orice valoare a necunoscutelor și pot fi aruncate.
Pentru a satisface a doua ecuație, putem alege valori arbitrare pentru și , apoi valoarea pentru va fi determinată fără ambiguitate: ![]() . Din prima ecuație, valoarea pentru este, de asemenea, găsită în mod unic:
. Din prima ecuație, valoarea pentru este, de asemenea, găsită în mod unic: ![]() .
.
Atât sistemul dat, cât și ultimul sunt compatibile, dar nedefinite, iar formulele
pentru arbitrare și să ne dea toate soluțiile sistemului dat.
Metoda Gauss și sisteme de ecuații liniare care nu au soluții
Următorul exemplu este un sistem inconsecvent de ecuații liniare, adică nu are soluții. Răspunsul la astfel de probleme este formulat astfel: sistemul nu are soluții.
După cum sa menționat deja în legătură cu primul exemplu, după efectuarea transformărilor în matricea extinsă a sistemului, liniile de formă
corespunzătoare unei ecuaţii de formă
Dacă printre ele există cel puțin o ecuație cu un termen liber diferit de zero (adică ), atunci acest sistem de ecuații este inconsecvent, adică nu are soluții, iar aceasta își completează soluția.
Exemplul 7 Rezolvați sistemul de ecuații liniare folosind metoda Gauss:

Decizie. Compunem matricea extinsă a sistemului. Folosind prima ecuație, excludem variabila din ecuațiile ulterioare. Pentru a face acest lucru, adăugați primul înmulțit cu la al doilea rând, primul înmulțit cu al treilea rând și primul înmulțit cu al patrulea rând.

Acum trebuie să utilizați a doua ecuație pentru a exclude variabila din ecuațiile ulterioare. Pentru a obține rapoarte întregi ale coeficienților, schimbăm al doilea și al treilea rând din matricea extinsă a sistemului.

Pentru a exclude din a treia și a patra ecuație, adăugați a doua, înmulțită cu , la al treilea rând, iar a doua, înmulțită cu , la al patrulea.
Acum, folosind a treia ecuație, eliminăm variabila din a patra ecuație. Pentru a face acest lucru, la a patra linie, adăugați a treia, înmulțit cu .

Sistemul dat este astfel echivalent cu următorul:
Sistemul rezultat este inconsecvent, deoarece ultima sa ecuație nu poate fi satisfăcută de nicio valoare a necunoscutelor. Prin urmare, acest sistem nu are soluții.
Să fie dat un sistem de ecuații algebrice liniare, care trebuie rezolvat (găsiți astfel de valori ale necunoscutelor хi care transformă fiecare ecuație a sistemului într-o egalitate).
Știm că un sistem de ecuații algebrice liniare poate:
1) Nu au soluții (fi incompatibil).
2) Au infinit de soluții.
3) Aveți o soluție unică.
După cum ne amintim, regula lui Cramer și metoda matricei sunt nepotrivite în cazurile în care sistemul are infinite de soluții sau este inconsecvent. metoda Gauss – cel mai puternic și versatil instrument pentru găsirea de soluții la orice sistem de ecuații liniare, care în fiecare caz conduce-ne la raspuns! Algoritmul metodei în toate cele trei cazuri funcționează în același mod. Dacă metodele Cramer și matrice necesită cunoașterea determinanților, atunci aplicarea metodei Gauss necesită cunoașterea doar a operațiilor aritmetice, ceea ce o face accesibilă chiar și elevilor de școală primară.
Transformări matrice extinse ( aceasta este matricea sistemului - o matrice compusă numai din coeficienții necunoscutelor, plus o coloană de termeni liberi) sisteme de ecuații algebrice liniare în metoda Gauss:
1) Cu troky matrici poate sa rearanja locuri.
2) dacă există (sau sunt) rânduri proporționale (ca caz special - identice) în matrice, atunci urmează șterge din matrice, toate aceste rânduri cu excepția unuia.
3) dacă în matrice a apărut un rând zero în timpul transformărilor, atunci urmează și el șterge.
4) rândul matricei poate înmulțire (împărțire) la orice alt număr decât zero.
5) la rândul matricei, puteți adăugați un alt șir înmulțit cu un număr, diferit de zero.
În metoda Gauss, transformările elementare nu modifică soluția sistemului de ecuații.
Metoda Gauss constă din două etape:
- „Mișcare directă” - folosind transformări elementare, aduceți matricea extinsă a sistemului de ecuații algebrice liniare într-o formă în trepte „triunghiulară”: elementele matricei extinse situate sub diagonala principală sunt egale cu zero (deplasarea de sus în jos) ). De exemplu, la acest tip:
Pentru a face acest lucru, efectuați următorii pași:
1) Să considerăm prima ecuație a unui sistem de ecuații algebrice liniare și coeficientul la x 1 este egal cu K. A doua, a treia etc. transformăm ecuațiile astfel: împărțim fiecare ecuație (coeficienți pentru necunoscute, inclusiv termeni liberi) la coeficientul pentru necunoscut x 1, care se află în fiecare ecuație, și înmulțim cu K. După aceea, scădem prima din a doua ecuație ( coeficienţi pentru necunoscute şi termeni liberi). Obținem la x 1 în a doua ecuație coeficientul 0. Din a treia ecuație transformată scădem prima ecuație, deci până când toate ecuațiile cu excepția primei, cu necunoscut x 1, nu vor avea coeficient 0.
2) Treceți la următoarea ecuație. Fie aceasta a doua ecuație și coeficientul de la x 2 este egal cu M. Cu toate ecuațiile „subordonate”, procedăm așa cum este descris mai sus. Astfel, „sub” necunoscutul x 2 în toate ecuațiile vor fi zerouri.
3) Trecem la următoarea ecuație și așa mai departe până rămâne un ultim termen liber necunoscut și transformat.
- „Mișcarea inversă” a metodei Gauss este de a obține o soluție la un sistem de ecuații algebrice liniare (mișcarea „de jos în sus”). Din ultima ecuație „inferioară” obținem o primă soluție - necunoscuta x n. Pentru a face acest lucru, rezolvăm ecuația elementară A * x n \u003d B. În exemplul de mai sus, x 3 \u003d 4. Înlocuim valoarea găsită în următoarea ecuație „superioară” și o rezolvăm în raport cu următoarea necunoscută. De exemplu, x 2 - 4 \u003d 1, adică x 2 \u003d 5. Și așa mai departe până găsim toate necunoscutele.
Exemplu.
Rezolvăm sistemul de ecuații liniare folosind metoda Gauss, așa cum ne sfătuiesc unii autori:
Scriem matricea extinsă a sistemului și, folosind transformări elementare, o aducem la o formă de pas:
Ne uităm la „pasul” din stânga sus. Acolo ar trebui să avem o unitate. Problema este că nu sunt deloc nimeni în prima coloană, așa că nimic nu poate fi rezolvat prin rearanjarea rândurilor. În astfel de cazuri, unitatea trebuie organizată folosind o transformare elementară. Acest lucru se poate face de obicei în mai multe moduri. Hai să o facem așa:
1 pas
. La prima linie adăugăm a doua linie, înmulțită cu -1. Adică am înmulțit mental a doua linie cu -1 și am efectuat adăugarea primei și a doua rânduri, în timp ce a doua linie nu s-a schimbat.
Acum în stânga sus „minus unu”, care ni se potrivește perfect. Cine vrea să obțină +1 poate efectua o acțiune suplimentară: înmulțiți prima linie cu -1 (schimbați-i semnul).
2 pas . Prima linie înmulțită cu 5 a fost adăugată la a doua linie, prima linie înmulțită cu 3 a fost adăugată la a treia linie.
3 pas . Prima linie a fost înmulțită cu -1, în principiu, aceasta este pentru frumusețe. S-a schimbat și semnul celei de-a treia rânduri și a fost mutat pe locul doi, astfel, la a doua „treaptă, am avut unitatea dorită.
4 pas . La a treia linie, adăugați a doua linie, înmulțită cu 2.
5 pas . A treia linie este împărțită la 3.
Un semn care indică o eroare în calcule (mai rar o greșeală de scriere) este un rezultat „proast”. Adică, dacă avem ceva de genul (0 0 11 | 23) mai jos și, în consecință, 11x 3 = 23, x 3 = 23/11, atunci cu un grad mare de probabilitate putem spune că a fost făcută o greșeală în timpul elementului transformări.
Efectuăm o mișcare inversă, în proiectarea exemplelor, sistemul în sine nu este adesea rescris, iar ecuațiile sunt „preluate direct din matricea dată”. Mișcarea inversă, vă reamintesc, funcționează „de jos în sus”. În acest exemplu, cadoul a rezultat:
x 3 = 1
x 2 = 3
x 1 + x 2 - x 3 \u003d 1, prin urmare x 1 + 3 - 1 \u003d 1, x 1 \u003d -1
Răspuns:x 1 \u003d -1, x 2 \u003d 3, x 3 \u003d 1.
Să rezolvăm același sistem folosind algoritmul propus. Primim
4 2 –1 1
5 3 –2 2
3 2 –3 0
Împărțim a doua ecuație cu 5 și a treia cu 3. Obținem:
4 2 –1 1
1 0.6 –0.4 0.4
1 0.66 –1 0
Înmulțind a doua și a treia ecuație cu 4, obținem:
4 2 –1 1
4 2,4 –1.6 1.6
4 2.64 –4 0
Scădeți prima ecuație din a doua și a treia ecuație, avem:
4 2 –1 1
0 0.4 –0.6 0.6
0 0.64 –3 –1
Împărțiți a treia ecuație la 0,64:
4 2 –1 1
0 0.4 –0.6 0.6
0 1 –4.6875 –1.5625
Înmulțiți a treia ecuație cu 0,4
4 2 –1 1
0 0.4 –0.6 0.6
0 0.4 –1.875 –0.625
Scădeți a doua ecuație din a treia ecuație, obținem matricea augmentată „în trepte”:
4 2 –1 1
0 0.4 –0.6 0.6
0 0 –1.275 –1.225
Astfel, deoarece o eroare acumulată în procesul de calcule, obținem x 3 \u003d 0,96, sau aproximativ 1.
x 2 \u003d 3 și x 1 \u003d -1.
Rezolvând astfel, nu te vei încurca niciodată în calcule și, în ciuda erorilor de calcul, vei obține rezultatul.
Această metodă de rezolvare a unui sistem de ecuații algebrice liniare este ușor de programat și nu ține cont de caracteristicile specifice ale coeficienților pentru necunoscute, deoarece în practică (în calculele economice și tehnice) trebuie să se ocupe de coeficienți neîntregi.
Iti doresc noroc! Ne vedem la ore! Tutore.
blog.site, cu copierea integrală sau parțială a materialului, este necesar un link către sursă.



