กำหนดการแปลงร่างบนเครื่องบิน ปัญหาผกผันของการแปลง Affine หรือประมาณหนึ่งสูตรที่สวยงาม ประเภทของการแปลง Affine
การแปลง Affine ที่ซับซ้อนใดๆ สามารถแสดงเป็นองค์ประกอบของการแปลง Affine เบื้องต้นได้หลายรายการ การวิเคราะห์แสดงให้เห็นว่าในกราฟิก 2D มีการแปลงความสัมพันธ์เบื้องต้นสี่แบบ ได้แก่ การหมุน การยืด การสะท้อน และการแปล
เปลี่ยน.
พิจารณาการหมุนของจุดใดก็ได้ กรอบจุดกำเนิดเป็นมุม(รูปที่ 6)
การแปลงความสัมพันธ์เบื้องต้นคือการหมุนด้วยมุม
จาก เรขาคณิตเชิงวิเคราะห์เป็นที่ทราบกันว่าการหมุนถูกอธิบายโดยการแปลงแบบอัฟฟินต่อไปนี้
 (5)
(5)
สะดวกในการรวมพิกัดของจุดในรูปแบบของเวกเตอร์ 2 มิติ (คอลัมน์) จากนั้นจุดเปลี่ยน กไปยังตำแหน่งจุด ก
 (6)
(6)
ในสัญลักษณ์นี้ การหมุนสามารถแสดงเป็นการคูณเมทริกซ์ได้
 (7)
(7)
ที่นี่ ร– เมทริกซ์การหมุน (การหมุน) โครงสร้างของเมทริกซ์นี้ได้มาจากสมการ (5)
 (8)
(8)
การยืด-การบีบอัด การปรับขนาด
ให้เราพิจารณาการทำงานของการยืด-อัดตามแนวแกนพิกัดพร้อมค่าสัมประสิทธิ์การยืด เค 1 ,เค 2. การดำเนินการนี้มักเรียกว่าการปรับขนาด  .
.

ตัวอย่างเช่น ให้เราแสดง (รูปที่ 7) การยืดของส่วนที่มีค่าสัมประสิทธิ์การยืดเท่ากับ  .
.
การเปลี่ยนแปลงความสัมพันธ์เบื้องต้น - การขยายด้วยค่าสัมประสิทธิ์
 (9)
(9)
การยืดอธิบายโดยการเปลี่ยนแปลงความสัมพันธ์ดังต่อไปนี้
 (10)
(10)
ที่นี่ การแปลง (9) สามารถแสดงเป็นการคูณเมทริกซ์ส
 (11)
(11)
– เมทริกซ์สเกล โครงสร้างของเมทริกซ์นี้ได้มาจากสมการ (9)
การสะท้อนกลับ ลองพิจารณาการทำงานของการสะท้อนสัมพันธ์กับแกนพิกัด ตัวอย่างเช่น ลองแสดง (รูปที่ 8) การสะท้อนที่สัมพันธ์กับแกน.

x
การเปลี่ยนแปลงความสัมพันธ์ขั้นต้น – การสะท้อนสัมพันธ์กับแกนวัว
 (12)
(12)
การสะท้อนกลับอธิบายได้โดยการแปลงความสัมพันธ์ดังต่อไปนี้
 (13)
(13)
ที่นี่ การแปลง (12) สามารถแสดงเป็นการคูณเมทริกซ์ม
 (14)
(14)
– เมทริกซ์การสะท้อน (กระจก – กระจกสะท้อน) โครงสร้างของเมทริกซ์นี้ได้มาจากสมการ (12) ในทำนองเดียวกัน เราจะพบเมทริกซ์การสะท้อนที่สัมพันธ์กับแกน.
 (15)
(15)
ย
โอนย้าย.  - ด้วยการดำเนินการนี้ วัตถุใดก็ตามจะเคลื่อนที่โดยไม่มีการบิดเบี้ยว และด้านใดด้านหนึ่งจะยังคงขนานกับตัวมันเอง ตัวอย่างเช่น เราแสดงในรูปที่ 9 การถ่ายโอนส่วนต่างๆ
- ด้วยการดำเนินการนี้ วัตถุใดก็ตามจะเคลื่อนที่โดยไม่มีการบิดเบี้ยว และด้านใดด้านหนึ่งจะยังคงขนานกับตัวมันเอง ตัวอย่างเช่น เราแสดงในรูปที่ 9 การถ่ายโอนส่วนต่างๆ

การแปลงความสัมพันธ์เบื้องต้น - ถ่ายโอนไปยังเวกเตอร์การแปล ที .
การถ่ายโอนอธิบายไว้โดยการแปลงรูปแบบต่อไปนี้
 (16)
(16)
เราต้องการแสดงการแปลง (16) ในรูปแบบของการคูณเมทริกซ์
 (17)
(17)
ที่นี่ ต– ต้องเป็นเมทริกซ์การแปล (การแปล – การแปล, การถ่ายโอน) อย่างไรก็ตาม เป็นไปไม่ได้ที่จะสร้างเมทริกซ์ ตมิติ 22 เพื่อให้สมการ (16) และ (17) สอดคล้องกัน
อย่างไรก็ตาม เมทริกซ์ดังกล่าวสามารถสร้างขึ้นได้หากเราพิจารณาการแปลงแบบ 2 มิติในพื้นที่ 3 มิติอย่างเป็นทางการ เมื่อต้องการทำเช่นนี้ เราจำเป็นต้องย้ายไปยังพิกัดที่เป็นเนื้อเดียวกัน
พิกัดที่เป็นเนื้อเดียวกัน
แนวคิดเรื่องพิกัดเนื้อเดียวกันมาจากเรขาคณิตที่ฉายภาพ ปล่อยให้ประเด็น กอยู่บนเครื่องบินและมีพิกัด ( ลองพิจารณาการทำงานของการสะท้อนสัมพันธ์กับแกนพิกัด ตัวอย่างเช่น ลองแสดง (รูปที่ 8) การสะท้อนที่สัมพันธ์กับแกน,ในทำนองเดียวกัน เราจะพบเมทริกซ์การสะท้อนที่สัมพันธ์กับแกน- แล้ว พิกัดที่เป็นเนื้อเดียวกันจุดนี้คือสามเท่าของตัวเลข x 1 , x 2 , x 3 ที่เกี่ยวข้องกับตัวเลขที่กำหนด ลองพิจารณาการทำงานของการสะท้อนสัมพันธ์กับแกนพิกัด ตัวอย่างเช่น ลองแสดง (รูปที่ 8) การสะท้อนที่สัมพันธ์กับแกนและ ในทำนองเดียวกัน เราจะพบเมทริกซ์การสะท้อนที่สัมพันธ์กับแกนความสัมพันธ์ดังต่อไปนี้
 (18)
(18)
เมื่อแก้ไขปัญหาคอมพิวเตอร์กราฟิก โดยปกติจะเลือกตัวเลขสามตัวต่อไปนี้เป็นพิกัดเนื้อเดียวกัน
ดังนั้น ณ จุดใดจุดหนึ่ง ก(ลองพิจารณาการทำงานของการสะท้อนสัมพันธ์กับแกนพิกัด ตัวอย่างเช่น ลองแสดง (รูปที่ 8) การสะท้อนที่สัมพันธ์กับแกน,ในทำนองเดียวกัน เราจะพบเมทริกซ์การสะท้อนที่สัมพันธ์กับแกน) เครื่องบินได้รับการกำหนดจุด ก(ลองพิจารณาการทำงานของการสะท้อนสัมพันธ์กับแกนพิกัด ตัวอย่างเช่น ลองแสดง (รูปที่ 8) การสะท้อนที่สัมพันธ์กับแกน,ในทำนองเดียวกัน เราจะพบเมทริกซ์การสะท้อนที่สัมพันธ์กับแกน, 1) ในอวกาศ โดยพื้นฐานแล้ว เรากำลังพิจารณาการเปลี่ยนแปลงของความสัมพันธ์ในระนาบ z= 1 ดังแสดงในรูปที่ 10

เชื่อมโยงการเปลี่ยนแปลงในพิกัดที่เป็นเนื้อเดียวกัน
พิกัดจุดที่อยู่ในระนาบ z= 1 ถูกรวมกันในรูปของเวกเตอร์ 3 มิติ จุดเปลี่ยน กไปยังตำแหน่งจุด ก* ถือเป็นการแปลงเวกเตอร์ได้
 (20)
(20)
ในสัญลักษณ์นี้ การแปลงความสัมพันธ์ทั่วไป (1) สามารถแสดงเป็นการคูณเมทริกซ์ได้
 (21)
(21)
นี่คือเมทริกซ์ ปของมิติ 33 คือเมทริกซ์ของการแปลงความสัมพันธ์ทั่วไป (1) และมีรูปแบบ
 (22)
(22)
เรามาสังเกตประเด็นสำคัญกัน ที่เกี่ยวข้องกับพิกัดที่เป็นเนื้อเดียวกัน การเปลี่ยนไปใช้เวกเตอร์และเมทริกซ์สามมิติ (20, 21, 22) สามารถดำเนินการอย่างเป็นทางการอย่างสมบูรณ์ โดยไม่ต้องเชื่อมโยงกับปริภูมิสามมิติจริง (x, y, z) วิธีการนี้ช่วยให้สามารถแนะนำพิกัดที่เป็นเนื้อเดียวกันสำหรับการแปลงความสัมพันธ์แบบ 3 มิติ และดำเนินการคูณเมทริกซ์ในพื้นที่เวกเตอร์ 4 มิติ
เมทริกซ์ที่แนะนำก่อนหน้านี้ของการแปลงความสัมพันธ์เบื้องต้นจะใช้รูปแบบต่อไปนี้ในพิกัดที่เป็นเนื้อเดียวกัน
เมทริกซ์การหมุน รในพิกัดเอกพันธ์จะมีรูปแบบดังนี้
 (23)
(23)
เมทริกซ์ยืด การแปลง (9) สามารถแสดงเป็นการคูณเมทริกซ์จะเปลี่ยนดังนี้
 (24)
(24)
เมทริกซ์การสะท้อน การแปลง (12) สามารถแสดงเป็นการคูณเมทริกซ์สัมพันธ์กับแกนพิกัดจะมีรูปแบบ
 (25)
(25)
เมทริกซ์การถ่ายโอน ตเพื่อออกอากาศเวกเตอร์  ในพิกัดเอกพันธ์จะมีรูปแบบดังนี้
ในพิกัดเอกพันธ์จะมีรูปแบบดังนี้
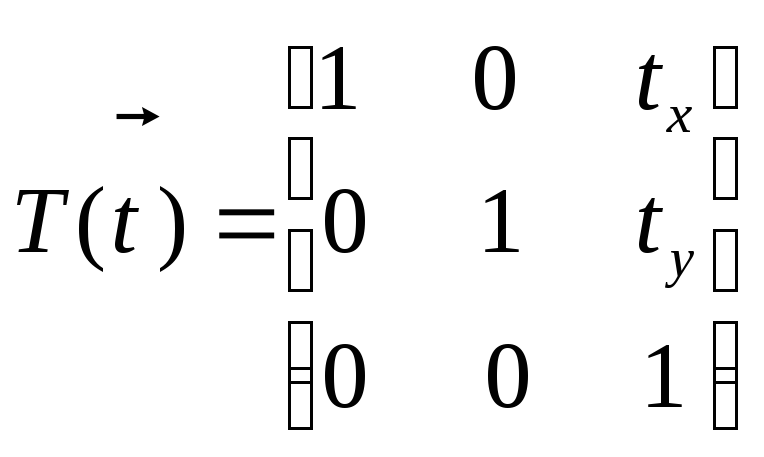 (26)
(26)
การแปลงความสัมพันธ์เป็นสิ่งหนึ่งที่รักษาความขนานของเส้น แต่ไม่จำเป็นต้องเป็นมุมหรือความยาว
ในคอมพิวเตอร์กราฟิกส์ ทุกอย่างที่เป็นของเคสสองมิติมักจะแสดงด้วยสัญลักษณ์ 2D (2 มิติ) สมมติว่ามีการใช้ระบบพิกัดเส้นตรงบนเครื่องบิน จากนั้นแต่ละจุด M จะถูกกำหนดคู่ลำดับของตัวเลข (x, y) ของพิกัด (รูปที่ 1)
สูตรข้างต้นสามารถพิจารณาได้สองวิธี: จุดจะถูกรักษาไว้และระบบพิกัดเปลี่ยนแปลง ในกรณีนี้จุด M โดยพลการจะยังคงเหมือนเดิม เฉพาะพิกัด (x, y) (x*, y*) เท่านั้นที่เปลี่ยนแปลง หรือ จุดเปลี่ยนแปลงและระบบพิกัดจะยังคงอยู่ในกรณีนี้ ในกรณีนี้ สูตรกำหนดการแม็ปที่นำจุดใดก็ได้ M(x, y) ไปยังจุด M*(x*, y*) ซึ่งพิกัดคือ กำหนดไว้ในระบบพิกัดเดียวกัน ในอนาคตเราจะตีความสูตรตามกฎว่าจุดของระนาบถูกแปลงในระบบพิกัดเส้นตรงที่กำหนด
ในการเปลี่ยนแปลงความสัมพันธ์ของเครื่องบิน มีบทบาทพิเศษโดยกรณีพิเศษที่สำคัญหลายกรณีซึ่งมีลักษณะทางเรขาคณิตที่ตรวจสอบย้อนกลับได้ดี เมื่อศึกษาความหมายทางเรขาคณิตของสัมประสิทธิ์ตัวเลขในสูตรสำหรับกรณีเหล่านี้ จะสะดวกที่จะถือว่าระบบพิกัดที่กำหนดนั้นเป็นคาร์ทีเซียนสี่เหลี่ยม
เทคนิคคอมพิวเตอร์กราฟิกที่ใช้กันมากที่สุด ได้แก่ การแปล การปรับขนาด การหมุน การสะท้อน นิพจน์และตัวเลขพีชคณิตที่อธิบายการแปลงเหล่านี้สรุปไว้ในตารางที่ 1
กำหนดการแปลงร่างบนเครื่องบิน
โดยการถ่ายโอนเราหมายถึงการเลื่อนเอาต์พุตดั้งเดิมไปเป็นเวกเตอร์เดียวกัน
การปรับขนาดคือการขยายหรือลดขนาดรูปภาพทั้งหมดหรือบางส่วน เมื่อปรับขนาด พิกัดของจุดภาพจะคูณด้วยตัวเลขที่กำหนด
การหมุนหมายถึงการหมุนของเอาต์พุตดั้งเดิมรอบแกนที่กำหนด (ในระนาบการวาด การหมุนจะเกิดขึ้นรอบจุด)
การสะท้อนหมายถึงการได้รับภาพสะท้อนในกระจกของภาพที่สัมพันธ์กับแกนใดแกนหนึ่ง (เช่น X)
การเลือกกรณีพิเศษทั้งสี่กรณีนี้จะพิจารณาจากสองสถานการณ์:
1. การแปลงแต่ละครั้งข้างต้นมีความหมายทางเรขาคณิตที่เรียบง่ายและชัดเจน (ตัวเลขคงที่ที่รวมอยู่ในสูตรข้างต้นก็มีความหมายทางเรขาคณิตด้วย)
2. ตามที่พิสูจน์แล้วในหลักสูตรเรขาคณิตวิเคราะห์ การเปลี่ยนแปลงใดๆ ของรูปแบบ (*) สามารถแสดงเป็นการดำเนินการตามลำดับ (การซ้อนทับ) ของการแปลงที่ง่ายที่สุดของรูปแบบ A, B, C และ D (หรือบางส่วนของสิ่งเหล่านี้ การเปลี่ยนแปลง)
ดังนั้น คุณสมบัติที่สำคัญต่อไปนี้ของการแปลงความสัมพันธ์ของระนาบจึงเป็นจริง: การแมปใดๆ ของแบบฟอร์ม (*) สามารถอธิบายได้โดยใช้การแมปที่ระบุโดยสูตร A, B, C และ D
หากต้องการใช้สูตรที่รู้จักกันดีเหล่านี้ในปัญหาคอมพิวเตอร์กราฟิกอย่างมีประสิทธิภาพ สัญลักษณ์เมทริกซ์จะสะดวกกว่า
เพื่อรวมการแปลงเหล่านี้เข้าด้วยกัน จะมีการแนะนำพิกัดที่เป็นเนื้อเดียวกัน พิกัดที่เป็นเนื้อเดียวกันของจุดคือค่าสามเท่าใดๆ ของจำนวนที่ไม่ใช่ศูนย์พร้อมกัน x1, x2, x3 ซึ่งสัมพันธ์กับตัวเลขที่กำหนด x และ y โดยความสัมพันธ์ต่อไปนี้:
จากนั้นจุด M(x, y) เขียนเป็น M(hX, hY, h) โดยที่ h 0 คือตัวประกอบสเกล พิกัดคาร์ทีเซียนสองมิติสามารถพบได้เป็น
ในเรขาคณิตเชิงโครงฉาย พิกัดเหล่านี้ถูกนำมาใช้เพื่อขจัดความไม่แน่นอนที่เกิดขึ้นเมื่อระบุองค์ประกอบที่อยู่ห่างออกไปอย่างไม่สิ้นสุด (ไม่เหมาะสม) พิกัดที่เป็นเนื้อเดียวกันสามารถตีความได้ว่าเป็นการฝังระนาบที่ปรับขนาดโดยปัจจัย h ลงในระนาบ Z= h ในพื้นที่สามมิติ
จุดในพิกัดเอกพันธ์จะถูกเขียนด้วยเวกเตอร์แถวสามองค์ประกอบ เมทริกซ์การแปลงต้องมีขนาด 3x3
การใช้พิกัดที่เป็นเนื้อเดียวกันสามเท่าและเมทริกซ์ลำดับที่สาม สามารถอธิบายการเปลี่ยนแปลงแบบสัมพัทธ์ใดๆ ของระนาบได้
ที่จริงแล้ว สมมติว่า h = 1 ลองเปรียบเทียบสองรายการ: รายการที่มีสัญลักษณ์ (*) และเมทริกซ์ต่อไปนี้:
ตอนนี้คุณสามารถใช้องค์ประกอบของการแปลงได้ โดยใช้ผลลัพธ์หนึ่งรายการ แทนที่จะใช้ชุดของการแปลงที่ติดตามกัน ตัวอย่างเช่น คุณสามารถแยกปัญหาที่ซับซ้อนออกเป็นปัญหาง่ายๆ ได้ การหมุนจุด A รอบจุด B โดยพลการสามารถแบ่งออกเป็นสามงาน:
การถ่ายโอนโดยที่ B = 0 (โดยที่ 0 คือจุดกำเนิด)
เปลี่ยน;
การถ่ายโอนแบบย้อนกลับซึ่งจุด B กลับสู่ตำแหน่งเดิม ฯลฯ
องค์ประกอบทั่วไปที่สุดของการดำเนินการ T, D, R, M มีเมทริกซ์:
ส่วนบนขนาด 2x2 - เมทริกซ์การหมุนและมาตราส่วนรวม และ tx และ ty อธิบายการแปลทั้งหมด
การเปลี่ยนแปลงพื้นฐานที่ระบุไว้มีดังนี้:
เลื่อนการย้ายหน้าต่างบนพื้นผิวการเรนเดอร์ (หากการเคลื่อนไหวถูกจำกัดเฉพาะทิศทางขึ้นและลงเท่านั้น จะเรียกว่าการเลื่อนแนวตั้ง)
ซูมการเปลี่ยนแปลงขนาดภาพอย่างค่อยเป็นค่อยไป
ตีลังกาภาพไดนามิกของเอาท์พุตดั้งเดิมที่หมุนรอบแกนใดแกนหนึ่งซึ่งการวางแนวจะเปลี่ยนแปลงอย่างต่อเนื่องในอวกาศ
กระทะการถ่ายโอนภาพอย่างค่อยเป็นค่อยไปเพื่อสร้างความรู้สึกเคลื่อนไหวทางภาพ
ยูดีซี 004.932
Kudrina M.A., Murzin A.V.
สถาบันการศึกษางบประมาณของรัฐบาลกลางด้านการศึกษาวิชาชีพระดับสูง "มหาวิทยาลัย Samara State Aerospace ตั้งชื่อตาม Ak. S.P. Korolev (มหาวิทยาลัยวิจัยแห่งชาติ)", Samara, รัสเซีย
การเปลี่ยนแปลงความสัมพันธ์ของวัตถุในคอมพิวเตอร์กราฟิก
งานทั่วไปอย่างหนึ่งที่ต้องแก้ไขโดยใช้กราฟิกแรสเตอร์คือการเปลี่ยนแปลงทั้งภาพโดยรวมและแต่ละส่วนของภาพ เช่น การเคลื่อนย้าย การหมุนรอบจุดศูนย์กลางที่กำหนด การเปลี่ยนขนาดเชิงเส้น เป็นต้น
ปัญหานี้แก้ไขได้โดยใช้การแปลงความสัมพันธ์
การแปลง Affine จะมีประโยชน์มากในสถานการณ์ต่อไปนี้:
1. การจัดองค์ประกอบภาพแบนหรือฉากสามมิติโดยการจัดองค์ประกอบประเภทเดียวกัน โดยการคัดลอก แปลง และย้ายไปยังตำแหน่งต่างๆ ของภาพ ตัวอย่างเช่น เพื่อสร้างวัตถุที่สมมาตร เช่น เกล็ดหิมะ คุณสามารถพัฒนาแม่ลายหนึ่งขึ้นมา แล้วสร้างภาพของวัตถุทั้งหมดได้โดยการสะท้อน หมุน และเคลื่อนย้ายแม่ลายนี้
2. การดูวัตถุสามมิติจากมุมมองที่ต่างกัน ในกรณีนี้ คุณสามารถกำหนดตำแหน่งกล้องและหมุนฉากได้ หรือในทางกลับกัน ปล่อยฉากไว้นิ่งๆ แล้วขยับกล้องไปรอบๆ การยักย้ายดังกล่าวสามารถดำเนินการได้โดยใช้การแปลงความสัมพันธ์แบบสามมิติ
3. เพื่อฉายวัตถุสามมิติบนเครื่องบินและแสดงฉากในหน้าต่าง ตัวอย่างเช่น สำหรับการฉายภาพแบบแอกโซโนเมตริก จะใช้ลำดับของการหมุนสองครั้งของระนาบการฉายภาพ และสำหรับการแสดงผลในหน้าต่าง จะใช้การผสมผสานระหว่างการปรับขนาดและการแปล
กำหนดการแปลงร่างบนระนาบเข้า มุมมองทั่วไปอธิบายได้ด้วยสูตรต่อไปนี้:
J X = ขวาน + โดย + C, . โปรแกรมนี้ช่วยให้คุณสามารถทำให้กระบวนการเขียนงานทดสอบเป็นไปโดยอัตโนมัติ
วรรณกรรม
1. โปเรฟ วี.เอ็น. คอมพิวเตอร์กราฟิกส์- - เซนต์ปีเตอร์สเบิร์ก: BHV-Petersburg, 2545 - 432 หน้า : ป่วย.
2.ฮิลล์ เอฟ โอเพ่น GL. การเขียนโปรแกรมคอมพิวเตอร์กราฟฟิก สำหรับมืออาชีพ - เซนต์ปีเตอร์สเบิร์ก: ปีเตอร์
2545. - 1,088 หน้า: ป่วย. ไอ 5-318-00219-6
3. Kudrina M.A., Kudrin K.A., Vytyagov A.A., Ionov D.O. การพัฒนาระบบ การเรียนรู้ทางไกลสำหรับรายวิชา "คอมพิวเตอร์กราฟิกส์" โดยใช้ Moodle: Proceedings of the international Symposium Reliability and Quality. 2553 ต.ไอ.ป. 165.
4. Kudrina M.A., Kudrin K.A., Degtyareva O.A. การรับรองสื่อการสอนการวัดสำหรับหลักสูตร "คอมพิวเตอร์กราฟิกส์" // ความน่าเชื่อถือและคุณภาพ 2551 การดำเนินการของนานาชาติ การประชุมสัมมนา เพนซา, 2008, หน้า 162-163.
5. คุดรินา M.A. การใช้ใบรับรองและสื่อการวัดการสอนสำหรับหลักสูตร
"คอมพิวเตอร์กราฟิกส์" ในกระบวนการศึกษา"//การศึกษา - การลงทุนสู่ความสำเร็จ: วัสดุทางวิทยาศาสตร์ -
ด้านล่าง \(f\) หมายถึงการแปลงความสัมพันธ์ที่เขียนในระบบพิกัดคาร์ทีเซียน \(O, \boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2)\) ตามสูตร
$$
x^(*)=a_(1)x+b_(1)y+c_(1),\ y^(*)=a_(2)x+b_(2)y+c_(2).\label( อ้างอิง 1)
$$
ระบุว่า
$$
\begin(วีเมทริกซ์)
ก_(1)&ข_(1)\\
ก_(2)&ข_(2)
\end(vmatrix) \neq 0.\label(ref2)
$$
ลองพิจารณาเส้นตรงบนระนาบด้วยสมการ \(\boldสัญลักษณ์(r)=\boldสัญลักษณ์(r)_(0)+\boldสัญลักษณ์(a)t\) และหาภาพของมันภายใต้การแปลง \(f\) (เข้าใจว่าภาพของเส้นเป็นเซตของภาพของจุด) เวกเตอร์รัศมีของรูปภาพ \(M^(*)\) ของจุดใดก็ได้ \(M\) สามารถคำนวณได้ดังนี้:
$$
\overrightarrow(OM^(*))=\overrightarrow(Of(O))+f\overrightarrow((O)M^(*))=\boldสัญลักษณ์(c)+f(\boldสัญลักษณ์(r)).\number
$$
โดยที่ \(\boldสัญลักษณ์(c)\) เป็นเวกเตอร์คงที่ \(\overrightarrow(Of)(O)\) และ \(\boldสัญลักษณ์(r)\) เป็นเวกเตอร์รัศมีของจุด \(M\) ตาม (11) §2 เราได้รับ
$$
\overrightarrow(OM^(*))=\boldสัญลักษณ์(c)+f(\boldสัญลักษณ์(r)_(0))+f(\boldสัญลักษณ์(a))t.\label(ref3)
$$
เนื่องจาก \(f\) เป็นการแปลงความสัมพันธ์และ \(\boldสัญลักษณ์(a) \neq \boldสัญลักษณ์(0)\) ดังนั้น \(\boldสัญลักษณ์(a)\) จะเข้าไปในเวกเตอร์ \(f(\boldสัญลักษณ์( a) ) \neq 0\) และสมการ \eqref(ref3) คือสมการของเส้นตรง ดังนั้น รูปภาพของจุดทุกจุดของเส้น \(\boldสัญลักษณ์(r)=\boldสัญลักษณ์(r)_(0)+\boldสัญลักษณ์(a)t\) จะอยู่บนเส้น \eqref(ref3)
ยิ่งกว่านั้น การแปลง \(f\) จะกำหนดการแมปแบบหนึ่งต่อหนึ่งของเส้นหนึ่งไปยังอีกเส้นหนึ่ง เนื่องจากเมื่อเลือกจุดเริ่มต้นและเวกเตอร์ทิศทางที่ทำไว้ที่นี่ จุด \(M^(*)\) ก็มีเหมือนกัน ค่าบนบรรทัด \eqref(ref3) พารามิเตอร์ \(t\) เหมือนกับจุด \(M\) บนบรรทัดเดิม จากที่นี่เราได้รับคำสั่งแรก
คำชี้แจง 1.
ด้วยการเปลี่ยนแปลงความสัมพันธ์:
- เส้นตรงกลายเป็นเส้นตรง
- ส่วนจะเข้าสู่ส่วน;
- เส้นขนานกลายเป็นเส้นขนาน
การพิสูจน์.
เพื่อพิสูจน์ข้อความที่สองก็เพียงพอที่จะสังเกตว่าส่วนของเส้นตรงประกอบด้วยจุดที่ค่าพารามิเตอร์เป็นไปตามความไม่เท่าเทียมกันของรูปแบบ \(t_(1) \leq t \leq t_(2)\) ข้อความสั่งที่สามตามมาจากข้อเท็จจริงที่ว่าภายใต้การเปลี่ยนแปลงแบบ Affine เวกเตอร์ collinear -th จะกลายเป็น collinear
คำชี้แจง 2
ในระหว่างการแปลงความสัมพันธ์ อัตราส่วนของความยาวของส่วนขนานจะไม่เปลี่ยนแปลง
การพิสูจน์.
ให้เซ็กเมนต์ \(AB\) และ \(CD\) ขนานกัน ซึ่งหมายความว่า มีตัวเลข \(\lambda\) ในลักษณะที่ \(\overrightarrow(AB)=\lambda \overrightarrow(CD)\) รูปภาพของเวกเตอร์ \(\overrightarrow(AB)\) และ \(\overrightarrow(CD)\) มีความสัมพันธ์กันด้วยการพึ่งพาแบบเดียวกัน \(\overrightarrow(A^(*)B^(*))=\lambda \ ลูกศรชี้ไปทางขวา(C^( *)D^(*))\) สืบต่อจากนี้ไปว่า
$$
\frac(|\overrightarrow(AB)|)(|\overrightarrow(CD)|)=\frac(|\overrightarrow(A^(*)B^(*))|)(|\overrightarrow(C^(*) )D^(*))|)=|\แลมบ์ดา|.\หมายเลข
$$
ผลที่ตามมา
ถ้าจุด \(C\) แบ่งส่วน \(AB\) ในความสัมพันธ์ \(\lambda\) ดังนั้นรูปภาพ \(C^(*)\) จะแบ่งรูปภาพ \(A^(*)B^ (*) \) ส่วน \(AB\) ในความสัมพันธ์เดียวกัน \(\lambda\)
การเปลี่ยนแปลงพื้นที่ระหว่างการเปลี่ยนแปลงความสัมพันธ์
ก่อนอื่นเรามาดูกันก่อน ให้เราเลือกระบบพิกัดคาร์ทีเซียนทั่วไป \(O, \boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2)\) และแสดงด้วย \((p_(1), p_(2)) \) และ \ ((q_(1), q_(2))\) ส่วนประกอบของเวกเตอร์ \(\boldสัญลักษณ์(p)\) และ \(\boldสัญลักษณ์(q)\) ที่มันถูกสร้างขึ้น เราสามารถคำนวณพื้นที่ของสี่เหลี่ยมด้านขนานได้โดยใช้:
$$
S_(\pm)=S_(\pm) (\boldสัญลักษณ์(p), \boldสัญลักษณ์(q))=(p_(1)q_(2)-p_(2)q_(1)) S_(\pm) ( \boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2)).\number
$$
ปล่อยให้การแปลงความสัมพันธ์ \(f\) เขียนในระบบพิกัดที่เลือกโดยใช้สูตร \eqref(ref1) จากสิ่งที่ได้รับการพิสูจน์ก่อนหน้านี้ เป็นไปตามที่เวกเตอร์ \(f(\boldสัญลักษณ์(p))\) และ \(f(\boldสัญลักษณ์(q))\) มี \(f(\boldสัญลักษณ์(e)_(1)) โดยพื้นฐานแล้ว f(\boldสัญลักษณ์(e)_(2))\) องค์ประกอบเดียวกัน \((p_(1), p_(2))\) และ \((q_(1), q_(2)) \) นั่น และเวกเตอร์ \(\boldสัญลักษณ์(p)\) และ \(\boldสัญลักษณ์(q)\) ในรูปแบบพื้นฐาน \(\boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2)\ ). รูปภาพของสี่เหลี่ยมด้านขนานถูกสร้างขึ้นบนเวกเตอร์ \(f(\boldสัญลักษณ์(p))\) และ \(f(\boldสัญลักษณ์(q))\) และพื้นที่ของมันจะเท่ากับ
$$
S_(\pm)^(*)=S_(\pm) (f(\boldสัญลักษณ์(p)), f(\boldสัญลักษณ์(q)))=(p_(1)q_(2)-p_(2)q_ (1)) S_(\pm) (f(\boldสัญลักษณ์(e)_(1)), f(\boldสัญลักษณ์(e)_(2))).\number
$$
ลองคำนวณปัจจัยสุดท้ายกัน ดังที่เราทราบจากสิ่งที่พิสูจน์แล้ว พิกัดของเวกเตอร์ \(f(\boldสัญลักษณ์(e)_(1)), f(\boldสัญลักษณ์(e)_(2))\) เท่ากัน ตามลำดับ \ ((a_(1), a_( 2))\) และ \((b_(1), b_(2))\) ดังนั้น \(S_(\pm) (f(\boldสัญลักษณ์(e)_(1)), f(\boldสัญลักษณ์(e)_(2)))=(a_(1)b_(2)-a_(2) b_(1)) S_(\pm) (\boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2))\) และ
$$
S_(\pm)^(*)=(p_(1)q_(2)-p_(2)q_(1))(a_(1)b_(2)-a_(2)b_(1)) S_( \pm) (\boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2)).\number
$$
จากที่นี่เราเห็นสิ่งนั้น
$$
\frac(S_(\pm)^(*))(S_(\pm))=\begin(vmatrix)
ก_(1)&ข_(1)\\
ก_(2)&ข_(2)
\end(vmatrix).\label(ref4)
$$
ดังนั้น อัตราส่วนของพื้นที่ของภาพของสี่เหลี่ยมด้านขนานเชิงพื้นที่ต่อพื้นที่ของสี่เหลี่ยมด้านขนานนี้จะเท่ากันสำหรับสี่เหลี่ยมด้านขนานทั้งหมด และเท่ากับ \(a_(1)b_(2)-a_(2)b_ (1)\)
ตามมาว่าปัจจัยนี้ไม่ได้ขึ้นอยู่กับการเลือกระบบพิกัดที่เขียนการแปลง แม้ว่าจะคำนวณจากค่าสัมประสิทธิ์ที่ขึ้นอยู่กับระบบพิกัดก็ตาม ปริมาณนี้เป็นค่าคงที่ที่แสดงคุณสมบัติทางเรขาคณิตของการแปลง
จากสูตร \eqref(ref4) เห็นได้ชัดว่าอัตราส่วนของพื้นที่ของภาพของสี่เหลี่ยมด้านขนานที่ไม่ได้มุ่งเน้นต่อพื้นที่นั้นเท่ากับ
$$
S^(*)/S=|a_(1)b_(2)-a_(2)b_(1)|.\label(ref5)
$$
ถ้า \(a_(1)b_(2)-a_(2)b_(1) > 0\) ดังนั้น การวางแนวของสี่เหลี่ยมด้านขนานทั้งหมดจะคงอยู่ในระหว่างการแปลง และถ้า \(a_(1)b_(2) -a_(2 )b_(1)< 0\), то для каждого ориентированного параллелограмма ориентация образа противоположна его ориентации.
เรามาจัดการกับพื้นที่ของตัวเลขอื่นๆ กันดีกว่า สามเหลี่ยมแต่ละอันสามารถขยายออกเป็นรูปสี่เหลี่ยมด้านขนานโดยมีพื้นที่เป็นสองเท่าของพื้นที่รูปสามเหลี่ยม ดังนั้น อัตราส่วนของพื้นที่ของรูปสามเหลี่ยมต่อพื้นที่ของสามเหลี่ยมนี้จึงเป็นที่น่าพอใจ \eqref(ref5)
รูปหลายเหลี่ยมทุกรูปสามารถแบ่งออกเป็นรูปสามเหลี่ยมได้ ดังนั้น สูตร \eqref(ref5) จึงใช้ได้กับรูปหลายเหลี่ยมใดๆ ก็ได้
เราจะไม่แตะต้องที่นี่ในการกำหนดพื้นที่ของรูปร่างโค้งโดยพลการ เราจะบอกเพียงว่าในกรณีเหล่านั้นเมื่อมีการกำหนดพื้นที่นี้ มันจะเท่ากับขีดจำกัดของพื้นที่ของลำดับรูปหลายเหลี่ยมจำนวนหนึ่งที่จารึกไว้ในรูปที่อยู่ระหว่างการพิจารณา จากทฤษฎีขีดจำกัด เราทราบสมมติฐานต่อไปนี้: ถ้าลำดับ \(S_(n)\) มีแนวโน้มไปที่ขีดจำกัด \(S\) ดังนั้นลำดับ \(\delta S_(n)\) โดยที่ \(\ delta\) เป็นค่าคงที่ มีแนวโน้มที่จะจำกัด \(\delta S\) จากข้อเสนอนี้ เราสรุปได้ว่าสูตร \eqref(ref5) ใช้ได้ในกรณีทั่วไปส่วนใหญ่
ตัวอย่างเช่น ขอให้เราค้นหานิพจน์สำหรับพื้นที่ของวงรีในรูปของครึ่งแกน ก่อนหน้านี้เราสังเกตเห็นว่าวงรีที่มีครึ่งแกน \(a\) และ \(b\) สามารถหาได้จากการบีบอัดวงกลมที่มีรัศมี \(a\) ให้เป็นเส้นตรงที่ผ่านจุดศูนย์กลางของมัน อัตราส่วนการบีบอัดคือ \(b/a\) หนึ่งในนั้นเราได้รับบันทึกพิกัดของการบีบอัดเป็นเส้นตรง \(x^(*)=x\), \(y^(*)=\lambda y\) ดีเทอร์มีแนนต์ของสัมประสิทธิ์ในสูตรเหล่านี้เท่ากับ \(\lambda\) ซึ่งก็คือในกรณีของเรา \(b/a\) ดังนั้น อัตราส่วนของพื้นที่วงรีต่อพื้นที่ของวงกลมคือ \(b/a\) และพื้นที่นี้คือ \(S=(b/a)\pi a^(2)\ ). ในที่สุดเราก็มี
$$
S=\pi ab.\number
$$
รูปภาพของบรรทัดลำดับที่สอง
เราได้เห็นแล้วว่าเส้นตรงกลายเป็นเส้นตรง นี่เป็นกรณีพิเศษของข้อความต่อไปนี้
คำชี้แจง 3
การแปลงความสัมพันธ์จะแปลงเส้นพีชคณิตเป็นเส้นพีชคณิตที่มีลำดับเดียวกัน
การพิสูจน์.
ที่จริงแล้ว ให้เส้นตรง \(L\) ในระบบพิกัดคาร์ทีเซียน \(O, \boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2)\) มีสมการพีชคณิตของลำดับ \(p \) เรารู้อยู่แล้วว่าภาพของทุกจุดของเส้น \(L\) ภายใต้การแปลงความสัมพันธ์ \(f\) มีอยู่ในระบบพิกัด \(f(O), f(\boldสัญลักษณ์(e)_(1)) , f(\boldสัญลักษณ์( e)_(2))\) เป็นพิกัดเดียวกันกับรูปภาพผกผันในระบบพิกัด \(O, \boldสัญลักษณ์(e)_(1), \boldสัญลักษณ์(e)_(2) \) ดังนั้น พิกัดของรูปภาพในระบบ \(f(O), f(\boldสัญลักษณ์(e)_(1)), f(\boldสัญลักษณ์(e)_(2))\) จึงมีความสัมพันธ์กันในลักษณะเดียวกัน สมการพีชคณิตสั่งซื้อ \(p\) นี่ก็เพียงพอแล้วที่จะได้ข้อสรุปที่เราต้องการ
จากข้อความที่พิสูจน์แล้วข้างต้น โดยเฉพาะอย่างยิ่ง เป็นไปตามที่บรรทัดลำดับที่สองภายใต้การแปลงความสัมพันธ์จะกลายเป็นบรรทัดลำดับที่สอง เราจะพิสูจน์ข้อความที่แข็งแกร่งยิ่งขึ้น ดังที่เราทราบแล้วว่าบรรทัดลำดับที่สองสามารถแบ่งออกเป็น เราจะเห็นว่าคลาสของบรรทัดถูกรักษาไว้ภายใต้การเปลี่ยนแปลงแบบ Affine บนพื้นฐานนี้ คลาสของเส้นที่ระบุในทฤษฎีบทดังกล่าวเรียกว่าคลาสแอฟฟิเน ลองพิสูจน์ข้อความใหม่กัน
คำชี้แจง 4
บรรทัดลำดับที่สองที่เป็นของคลาส Affine หนึ่งคลาสสามารถแปลงเป็นบรรทัดของคลาสเดียวกันได้ภายใต้การแปลง Affine ใดๆ เท่านั้น บรรทัดลำดับที่สองแต่ละบรรทัดสามารถแปลงได้โดยการแปลงอัฟฟินที่เหมาะสมไปเป็นบรรทัดอื่นใดในคลาสอัฟฟินเดียวกัน
การพิสูจน์.
เราจะเรียกเส้นมีขอบเขตถ้ามันอยู่ภายในสี่เหลี่ยมด้านขนาน จะเห็นได้ง่ายว่าด้วยการแปลงความสัมพันธ์ เส้นที่มีขอบเขตจะต้องกลายเป็นขอบเขต และเส้นที่ไม่มีขอบเขตจะต้องกลายเป็นไม่มีขอบเขต
- วงรีคือเส้นลำดับที่สองที่มีขอบเขต นอกจากวงรีแล้ว มีเพียงเส้นที่ประกอบด้วยจุดเดียวเท่านั้น ซึ่งก็คือเส้นตัดจินตภาพคู่หนึ่งเท่านั้นที่ถูกจำกัด เนื่องจากวงรีมีจำนวนจำกัดและประกอบด้วยจุดมากกว่าหนึ่งจุด จึงสามารถแปลงเป็นรูปวงรีได้เท่านั้น
- ไฮเปอร์โบลามีสองกิ่งแยกจากกัน คุณสมบัตินี้สามารถกำหนดได้ในลักษณะที่ทำให้ค่าคงที่ภายใต้การแปลงความสัมพันธ์มีความชัดเจน กล่าวคือ มีเส้นตรงที่ไม่ตัดกันไฮเปอร์โบลา แต่ตัดกันบางคอร์ดของมัน ในบรรดาเส้นลำดับที่สองทั้งหมด มีเพียงไฮเปอร์โบลาและคู่ของเส้นคู่ขนานเท่านั้นที่มีคุณสมบัตินี้ กิ่งก้านของไฮเปอร์โบลาไม่ใช่เส้นตรง ดังนั้น เมื่อแปลงแบบอัฟฟินี จึงสามารถแปลงเป็นไฮเปอร์โบลาได้เท่านั้น
- พาราโบลาคือเส้นไม่จำกัดลำดับที่สอง ประกอบด้วยชิ้นส่วนที่ไม่เป็นเส้นตรงหนึ่งชิ้น ไม่มีบรรทัดลำดับที่สองอื่นๆ ที่มีคุณสมบัตินี้ ดังนั้นพาราโบลาจึงสามารถแปลงเป็นพาราโบลาได้เท่านั้น
- หากเส้นลำดับที่สองแทนจุด (คู่ของเส้นตัดจินตภาพ) เส้น (เส้นตรงคู่หนึ่ง) คู่ของเส้นตัดกัน หรือคู่ของเส้นคู่ขนาน จากคุณสมบัติที่พิสูจน์แล้วก่อนหน้านี้ของการแปลงความสัมพันธ์ ตามมาว่าบรรทัดนี้ไม่สามารถแปลงเป็นบรรทัดของคลาสอื่นได้
ให้เราพิสูจน์ส่วนที่สองของข้อเสนอ ในสิ่งที่เราได้พิสูจน์แล้ว สมการบัญญัติเส้นลำดับที่สองเขียนในระบบพิกัดสี่เหลี่ยมคาร์ทีเซียนและมีพารามิเตอร์ \(a, b, …\) หากเราละทิ้งความเป็นออร์โธนอร์มัลลิตี้ของพื้นฐาน เราก็สามารถทำให้สมการสารบัญญัติง่ายขึ้นอีก และนำมาสู่รูปแบบที่ ไม่มีพารามิเตอร์ ตัวอย่างเช่น การแทนที่พิกัด \(x'=x/a\), \(y'=y/b\) แปลงสมการวงรี \(x^(2)a^(2)+y^(2)b ^(2 )=1\) ลงในสมการ \(x'^(2)+y'^(2)=1\) ไม่ว่าจะเป็น \(a\) และ \(b\) ก็ตาม (สมการสุดท้ายไม่ใช่สมการของวงกลม เนื่องจาก ระบบใหม่พิกัดไม่ใช่สี่เหลี่ยมคาร์ทีเซียน)
ผู้อ่านสามารถแสดงให้เห็นได้อย่างง่ายดายว่าสมการบัญญัติของเส้นอันดับสองสามารถเปลี่ยนเป็นสมการต่อไปนี้ได้โดยการย้ายไปยังระบบพิกัดที่เหมาะสม:
- \(x^(2)+y^(2)=1\);
- \(x^(2)+y^(2)=0\);
- \(x^(2)-y^(2)=1\);
- \(x^(2)-y^(2)=0\);
- \(y^(2)=2x\);
- \(y^(2)-1=0\);
- \(y^(2)=0\)
เราจะเรียกระบบพิกัดดังกล่าวว่าระบบพิกัดแบบบัญญัติที่เกี่ยวข้อง
ตามมาจากก่อนหน้านี้ การเปลี่ยนแปลงความสัมพันธ์ที่รวมระบบพิกัดเชิงบัญญัติของความสัมพันธ์ความสัมพันธ์ของสองบรรทัดที่มีคลาสความสัมพันธ์เดียวกันก็รวมเส้นเหล่านี้เข้าด้วยกันด้วย เป็นการเสร็จสิ้นการพิสูจน์
การสลายตัวของการเปลี่ยนแปลงมุมฉาก
ทฤษฎีบท 1
การแปลงมุมตั้งฉากแต่ละครั้งจะสลายตัวเป็นผลคูณของการแปลแบบขนาน การหมุน และบางทีอาจเป็นสมมาตรตามแนวแกน
การพิสูจน์.
กำหนดให้ \(f\) เป็นการแปลงมุมฉาก และ \(\vartriangle ABC\) เป็นหน้าจั่ว สามเหลี่ยมมุมฉากมีมุมขวา \(A\) เมื่อแปลง \(f\) มันจะเปลี่ยนเป็นสามเหลี่ยมเท่ากัน \(\vartriangle A^(*)B^(*)C^(*)\) โดยมีมุมฉากที่จุดยอด \(A^(*) \) ทฤษฎีบทนี้จะได้รับการพิสูจน์ ถ้าโดยการแปลแบบขนานตามลำดับ \(p\) การหมุน \(q\) และ (ถ้าจำเป็น) สมมาตรตามแนวแกน \(r\) เราสามารถรวมสามเหลี่ยม \(ABC\) และ \( อ^ (*)B^(*)ค^(*)\) แท้จริงแล้ว ผลิตภัณฑ์ \(rqp\) เป็นการแปลงความสัมพันธ์เหมือนกับ \(f\) และการแปลงความสัมพันธ์ถูกกำหนดโดยรูปภาพของจุดสามจุดที่ไม่อยู่ในเส้นเดียวกัน ดังนั้น \(rqp\) จึงเกิดขึ้นพร้อมกับ \(f\)
ดังนั้น ลองแปล \(A\) และ \(A^(*)\) โดยการถ่ายโอนแบบขนาน \(p\) เป็นเวกเตอร์ \(\overrightarrow(AA^(*))\) (ถ้า \(A=A ^(* )\) ดังนั้น \(p\) คือการแปลงเอกลักษณ์) จากนั้น โดยการหมุน \(q\) รอบจุด \(A^(*)\) \(p(B)\) เข้ากันได้กับ \(B^(*)\) (บางทีการแปลงนี้ก็อาจจะเหมือนกันเช่นกัน ). จุด \(q(p(C))\) เกิดขึ้นพร้อมกับ \(C^(*)\) หรือมีความสมมาตรเมื่อเทียบกับเส้นตรง \(A^(*)B^(*)\ ). ในกรณีแรก บรรลุเป้าหมายแล้ว และในกรณีที่สอง จะต้องมีความสมมาตรตามแนวแกนสัมพันธ์กับเส้นตรงที่ระบุ ทฤษฎีบทได้รับการพิสูจน์แล้ว
โปรดทราบว่าการขยายตัวของการเปลี่ยนแปลงมุมฉากที่เกิดขึ้นนั้นไม่ซ้ำกัน นอกจากนี้ การหมุนหรือการแปลแบบขนานสามารถแยกย่อยเป็นผลคูณของสมมาตรตามแนวแกน ผลคูณของการแปลและการหมุนแบบขนานสามารถแสดงเป็นการหมุนครั้งเดียว และอื่นๆ เราจะไม่ระบุวิธีการทำเช่นนี้ แต่จะชี้แจงคุณสมบัติทั่วไปต่อไปนี้ของส่วนขยายทั้งหมดดังกล่าว
คำชี้แจงที่ 5
สำหรับการขยายการแปลงมุมตั้งฉากเป็นผลคูณของการแปลแบบคู่ขนาน การหมุน และสมมาตรตามแนวแกน ความเท่าเทียมกันของจำนวนสมมาตรตามแนวแกนที่รวมอยู่ในการขยายจะเท่ากัน
การพิสูจน์.
เพื่อพิสูจน์ให้พิจารณาบนเครื่องบิน พื้นฐานโดยพลการและติดตามการเปลี่ยนแปลงในการวางแนว (ทิศทางของการหมุนที่สั้นที่สุดจาก \(\boldสัญลักษณ์(e)_(1)\) เป็น \(\boldสัญลักษณ์(e)_(2)\)) ในระหว่างการแปลงที่ดำเนินการ โปรดทราบว่าการหมุนและการแปลแบบขนานจะไม่เปลี่ยนการวางแนวของฐานใดๆ แต่สมมาตรตามแนวแกนจะเปลี่ยนการวางแนวของฐานใดๆ ดังนั้น ถ้าการแปลงมุมตั้งฉากเปลี่ยนการวางแนวของฐาน การขยายตัวใดๆ ของฐานนั้นจะต้องรวมสมมาตรของแกนเป็นจำนวนคี่ด้วย หากการวางแนวของฐานไม่เปลี่ยนแปลง จำนวนสมมาตรของแกนที่รวมอยู่ในส่วนขยายจะเป็นได้เพียงเลขคู่เท่านั้น
คำนิยาม.
เรียกว่าการแปลงมุมฉากที่สามารถแยกย่อยเป็นผลคูณของการแปลและการหมุนแบบขนาน การแปลงมุมตั้งฉากชนิดที่หนึ่ง และที่เหลือ - การแปลงมุมฉากของชนิดที่สอง .
การแปลงมุมตั้งฉากในระบบพิกัดสี่เหลี่ยมคาร์ทีเซียนเขียนไว้ว่า:
$$
\begin(อาร์เรย์)(ซีซี)
\end(array).\number
$$
ด้วยเครื่องหมายบนของสัมประสิทธิ์ \(y\) ในสูตรเหล่านี้ ดีเทอร์มิแนนต์ที่ประกอบด้วยสัมประสิทธิ์จะเท่ากับ +1 และด้วยเครื่องหมายล่างจะเท่ากับ -1 จากที่นี่และจากสูตร \eqref(ref4) ข้อความต่อไปนี้จะตามมา
คำชี้แจง 6
การแปลงมุมฉากของชนิดที่ 1 เขียนในระบบพิกัดสี่เหลี่ยมคาร์ทีเซียนโดยใช้สูตร
$$
\begin(อาร์เรย์)(ซีซี)
& x^(*)=x \cos \varphi \mp y \sin \varphi+c_(1),\\
& y^(*)=x \sin \varphi \pm y \cos \varphi+c_(2)
\end(array).\number
$$
ด้วยเครื่องหมายบนสำหรับค่าสัมประสิทธิ์ของ \(y\) และการแปลงมุมตั้งฉากของชนิดที่สอง - ด้วยเครื่องหมายล่าง
การสลายตัวของการเปลี่ยนแปลงความสัมพันธ์
เราได้เห็นแล้วว่าการแปลงความสัมพันธ์สามารถเปลี่ยนระนาบได้มากเพียงใด วงกลมสามารถเปลี่ยนเป็นวงรี สามเหลี่ยมปกติให้กลายเป็นระนาบใดก็ได้ ดูเหมือนว่าไม่สามารถรักษามุมได้ อย่างไรก็ตาม ข้อความต่อไปนี้ถือเป็น
คำชี้แจงที่ 7
สำหรับการแปลงความสัมพันธ์แต่ละครั้ง จะมีเส้นตั้งฉากกันสองเส้นที่แปลงเป็นเส้นตั้งฉากกัน
การพิสูจน์.
เพื่อพิสูจน์สิ่งนี้ ให้พิจารณาวงกลม ด้วยการเปลี่ยนแปลงความสัมพันธ์นี้ มันจะกลายเป็นวงรี แกนวงรีแต่ละแกนคือเซตของจุดกึ่งกลางของคอร์ดที่ขนานกับแกนอีกแกนหนึ่ง ในระหว่างการแปลงความสัมพันธ์ คอร์ดจะเปลี่ยนเป็นคอร์ด ความเท่าเทียมจะต้องยังคงอยู่ และจุดกึ่งกลางของเซกเมนต์จะเปลี่ยนเป็นจุดกึ่งกลางของภาพ ดังนั้นต้นแบบของแกนวงรีจึงเป็นส่วนที่มีคุณสมบัติเหมือนกัน: แต่ละส่วนคือเซตของจุดกึ่งกลางของคอร์ดของวงกลมที่ขนานกับอีกส่วนหนึ่ง ส่วนดังกล่าวมีเส้นผ่านศูนย์กลางของวงกลมตั้งฉากกันสองอันอย่างแน่นอน นี่คือสิ่งที่เราต้องการ: วงกลมมีเส้นผ่านศูนย์กลางตั้งฉากกันสองเส้นซึ่งแปลงเป็นส่วนตั้งฉากซึ่งกันและกัน - แกนของวงรี
เป็นที่น่าสังเกตกรณีพิเศษอย่างหนึ่ง: วงกลมที่อยู่ใต้การเปลี่ยนแปลงแบบสัมพันธ์สามารถกลายเป็นวงกลมได้ ในกรณีนี้ ให้ใช้เหตุผลเดียวกันกับเส้นผ่านศูนย์กลางสองเส้นที่ตั้งฉากกันของภาพวงกลม เห็นได้ชัดว่าในกรณีนี้ ทิศทางสองทิศทางที่ตั้งฉากกันจะยังคงตั้งฉากกัน
คำนิยาม.
ทิศทางตั้งฉากกันสองทิศทางเรียกว่าทิศทางหลักหรือทิศทางเอกพจน์ของการแปลงความสัมพันธ์ \(f\) หากทิศทางทั้งสองเปลี่ยนทิศทางเป็นทิศทางตั้งฉากซึ่งกันและกัน
ทฤษฎีบท 2
การแปลงความสัมพันธ์แต่ละครั้งจะถูกแยกย่อยเป็นผลคูณของการแปลงมุมฉากและการบีบอัดสองครั้งเป็นเส้นตั้งฉากกันสองเส้น
การพิสูจน์.
หลักฐานก็คล้ายกับหลักฐาน พิจารณาการแปลงความสัมพันธ์ \(f\) และเลือกสามเหลี่ยมหน้าจั่ว \(ABC\) เพื่อให้ขา \(AB\) และ \(AC\) หันไปตามทิศทางหลักของการแปลง \(f\) ให้เราแสดงด้วย \(A^(*)\), \(B^(*)\) และ \(C^(*)\) ภาพของจุดยอดของมัน ขอให้เราสร้างการแปลงตั้งฉาก \(g\) โดยที่ \(g(A)=A^(*)\) และจุด \(g(B)\) และ \(g(C)\) อยู่ตามลำดับ บนรังสี \(A^(*)B^(*)\) และ \(A^(*)C^(*)\) (ซึ่งสามารถทำได้ง่าย เช่นเดียวกับในทฤษฎีบทที่ 1 โดยการแปลแบบขนาน การหมุน และสมมาตรตามแนวแกน)
ให้ \(\lambda=|A^(*)B^(*)|/|A^(*)g(B)|\), a \(\mu=|A^(*)C^(*) |/|A^(*)ก(C)|\) จากนั้นการหดตัวของ \(p_(1)\) ไปยังเส้นตรง \(A^(*)C^(*)\) ในความสัมพันธ์ \(\lambda\) จะเปลี่ยน \(g(B)\) เป็น \ (p_(1) g(B)=B^(*)\) และจะไม่เลื่อนจุด \(A^(*)\) และ \(g(C)\) ในทำนองเดียวกัน การทำสัญญา \(p_(2)\) กับบรรทัด \(A^(*)B^(*)\) จะแปลง \(g(C)\) เป็น \(p_(2)g(C)= C^ (*)\) และจะไม่เลื่อนจุดของเส้น \(A^(*)B^(*)\)
ซึ่งหมายความว่าผลิตภัณฑ์ \(p_(2)p_(1)g\) นำคะแนน \(A\), \(B\) และ \(C\) ไปยังจุด \(A^(*)\) , \ (B^(*)\) และ \(C^(*)\) เช่นเดียวกับการเปลี่ยนแปลง \(f\) ที่มอบให้เรา จากสิ่งที่พิสูจน์แล้วก่อนหน้านี้ เรามี \(p_(2)p_(1)g=f\) ตามที่ต้องการ
บทที่ 1 แนวคิดเรื่องการเปลี่ยนแปลงทางเรขาคณิต
1.1 การแปลงทางเรขาคณิตคืออะไร?
สมมาตรตามแนวแกน สมมาตรกลาง การหมุน การแปลแบบขนาน ความสมมาตรมีเหมือนกันที่พวกมันจะ "แปลง" แต่ละรูป F ให้กลายเป็นรูป F1 ใหม่ ดังนั้นจึงเรียกว่าการแปลงทางเรขาคณิต
โดยทั่วไป การแปลงทางเรขาคณิตคือกฎเกณฑ์ใดๆ ที่อนุญาตให้แต่ละจุด A บนระนาบระบุจุด A ใหม่ ซึ่งจุด A จะถูกถ่ายโอนไปยังจุดนั้นโดยการแปลงที่ต้องการ หากมีการกำหนดรูป F ใดๆ บนระนาบ แสดงว่าเซตนั้น ของจุดทั้งหมดที่เส้นละเอียดของรูป F อยู่ระหว่างการพิจารณา แสดงถึงรูป F ใหม่ ในกรณีนี้ เราบอกว่า F" ได้มาจาก F โดยใช้การแปลงที่กำลังพิจารณา
ตัวอย่าง. สมมาตรรอบเส้นตรง l คือการแปลงทางเรขาคณิต กฎที่อนุญาตให้เราค้นหาจุด A" จากจุด A" ในกรณีนี้มีดังนี้: จากจุด A AP ตั้งฉากจะถูกลดระดับลงบนเส้นตรง l และบนส่วนขยายที่เลยจุด P ส่วน RA" = AP ถูกเลิกจ้าง
นอกเหนือจากการแปลงทางเรขาคณิต
สมมติว่าเรากำลังพิจารณาการแปลงทางเรขาคณิตสองแบบ หนึ่งในนั้นเราเรียกว่า "ครั้งแรก" และอีกอันเรียกว่า "ครั้งที่สอง" ลองหาจุด A บนระนาบตามใจชอบแล้วเขียนแทนด้วย A" ซึ่งเป็นจุดที่ A ไปในระหว่างการแปลงครั้งแรก ในทางกลับกัน จุด A" จะถูกถ่ายโอนโดยการแปลงครั้งที่สองไปยังจุด A ใหม่ หรืออีกนัยหนึ่งคือ จุด A" ได้มาจากจุด A โดยใช้การแปลงสองครั้งตามลำดับ - ครั้งแรกและครั้งที่สอง
ผลลัพธ์ของการดำเนินการตามลำดับของการแปลงทั้งสองที่เกิดขึ้นก็คือการแปลงทางเรขาคณิตเช่นกัน โดยต้องใช้จุด A ไปยังจุด A" การแปลง "ผลลัพธ์" นี้เรียกว่าผลรวมของการแปลงครั้งแรกและครั้งที่สองที่พิจารณา
ให้รูป F ปรากฏอยู่บนระนาบ การแปลงครั้งแรกแปลงเป็นรูป F" การแปลงครั้งที่สองแปลงรูป F" ให้เป็นรูป F" ใหม่ ผลรวมของการแปลงครั้งแรกและครั้งที่สองจะแปลงรูป F เป็นรูป F ทันที"
ตัวอย่าง. ให้การแปลงครั้งแรกแสดงถึงความสมมาตรรอบจุด O1 และการแปลงครั้งที่สองแสดงถึงความสมมาตรรอบจุด O2 อีกจุดหนึ่ง ลองหาผลรวมของการแปลงทั้งสองนี้กัน
ให้ A เป็นจุดใดก็ได้บนเครื่องบิน ก่อนอื่นให้เราสมมติว่าจุด A ไม่ได้อยู่บนเส้น O1O2 ให้เราแสดงด้วย A" จุด จุดสมมาตรสัมพันธ์กับ O1 และผ่าน A" - จุดสมมาตรกับจุด A" สัมพันธ์กับ O2 เนื่องจาก O1O2 เป็นเส้นตรงกลางของสามเหลี่ยม AA"A"" ดังนั้น ส่วน AA" จึงขนานกับส่วน O1O2 และมีความยาวเป็นสองเท่า ทิศทางจากจุด A ไปยังจุด A" เกิดขึ้นพร้อมกับทิศทางจากจุด
O1 ถึงจุด O2 ตอนนี้ให้เราเขียนเวกเตอร์ด้วย MN โดยที่เซกเมนต์ MN และ O1 O2 ขนานกัน ส่วน MN ยาวเป็นสองเท่าของเซกเมนต์ O1O2 และรังสี MN และ O1O2 มีทิศทางเดียวกัน จากนั้น AA" = MN เช่น จุด A" จะได้มาจากจุด A โดยการถ่ายโอนแบบขนานไปยังเวกเตอร์ MNเช่นเดียวกับจุดที่วางอยู่บนเส้น O1O2
ในที่สุด เราก็ได้: ผลรวมของสมมาตรรอบจุด O1 และสมมาตรรอบจุด O2 แสดงถึงการแปลแบบขนาน
1.2 การเคลื่อนไหว
สมมาตรตามแนวแกน การหมุน (โดยเฉพาะ สมมาตรกลาง) และการแปลแบบขนานมีเหมือนกันที่การแปลงแต่ละครั้งจะเปลี่ยนรูป F ใดๆ บนระนาบให้เป็นรูปที่เท่ากัน F " การแปลงที่มีคุณสมบัตินี้เรียกว่าการเคลื่อนที่ Homothety เป็นตัวอย่างของ การเปลี่ยนแปลง ซึ่งไม่ใช่การเคลื่อนไหว แท้จริงแล้ว การเคลื่อนไหวแต่ละครั้งจะแปลงร่างใด ๆ ให้กลายเป็นร่างที่เท่ากัน กล่าวคือ เพียงเปลี่ยนตำแหน่งของร่างบนระนาบเท่านั้น ความคล้ายคลึงกันก็เปลี่ยนขนาดของร่างด้วย
บทบาทของการเคลื่อนไหวในเรขาคณิต
การเคลื่อนไหวมีบทบาทอย่างมากในเรขาคณิต บทบาทที่สำคัญ- พวกมันจะไม่เปลี่ยนรูปร่างหรือขนาดของฟิกเกอร์ โดยเปลี่ยนเฉพาะตำแหน่งของฟิกเกอร์เท่านั้น แต่ตัวเลขที่แตกต่างกันเฉพาะตำแหน่งบนเครื่องบินนั้นเหมือนกันโดยสิ้นเชิงจากมุมมองของเรขาคณิต นั่นคือสาเหตุว่าทำไมจึงเรียกพวกมันว่า "ตัวเลขเท่ากัน" ในเรขาคณิต ไม่มีทรัพย์สิน รูปทรงเรขาคณิตไม่แตกต่างจากคุณสมบัติที่สอดคล้องกันของจำนวนที่เท่ากัน ตัวอย่างเช่น สามเหลี่ยมที่เท่ากันไม่เพียงแต่มีด้านที่เหมือนกันเท่านั้น แต่ยังมีมุม ค่ามัธยฐาน เส้นแบ่งครึ่ง พื้นที่ รัศมีวงกลมที่ขีดไว้และในขอบเขตที่เหมือนกัน และอื่นๆ อีกด้วย
ในบทเรียนเรขาคณิต เราถือว่าตัวเลขที่เท่ากันเสมอ (นั่นคือ ตัวเลขที่สามารถรวมกันได้ด้วยการเคลื่อนไหว) ให้เท่ากันหรือแยกไม่ออก ตัวเลขดังกล่าวมักเข้าใจผิดว่าเป็นตัวเลขเดียวกัน นั่นคือเหตุผลที่เราสามารถพูดได้ว่า ตัวอย่างเช่น ปัญหาในการสร้างสามเหลี่ยมโดยใช้สองด้าน a, b และมุม C ระหว่างพวกมันมีวิธีแก้ปัญหาเพียงวิธีเดียว ที่จริงแล้ว คุณสามารถหาสามเหลี่ยมจำนวนอนันต์ที่มีด้าน a และ b ที่กำหนด และมุม C ที่มีขนาดที่กำหนดระหว่างสามเหลี่ยมเหล่านั้นได้ อย่างไรก็ตาม สามเหลี่ยมเหล่านี้ทั้งหมดเท่ากันและเท่ากัน ดังนั้นจึงถือเป็นสามเหลี่ยม "หนึ่ง" ได้
ดังนั้น เรขาคณิตจึงศึกษาคุณสมบัติของตัวเลขที่เหมือนกันสำหรับตัวเลขที่เท่ากัน คุณสมบัติดังกล่าวเรียกได้ว่าเป็น "คุณสมบัติทางเรขาคณิต" กล่าวอีกนัยหนึ่ง: เรขาคณิตศึกษาคุณสมบัติของตัวเลขที่ไม่ขึ้นอยู่กับตำแหน่งของพวกมัน แต่ตัวเลขที่แตกต่างกันเฉพาะตำแหน่ง (ตัวเลขเท่ากัน) คือตัวเลขที่สามารถรวมกันได้โดยใช้การเคลื่อนไหว ดังนั้นเราจึงมาถึงคำจำกัดความของวิชาเรขาคณิตดังต่อไปนี้ เรขาคณิตศึกษาคุณสมบัติของตัวเลขที่ยังคงอยู่ระหว่างการเคลื่อนไหว
การเคลื่อนไหวทางเรขาคณิตและฟิสิกส์
ดังนั้น แนวคิดเรื่องการเคลื่อนที่จึงมีบทบาทหลักในเรขาคณิต การเคลื่อนไหว (“การทับซ้อนกัน”) ถูกนำมาใช้ในเกรด VI เพื่อกำหนดตัวเลขที่เท่ากัน เพื่อพิสูจน์สัญญาณของความเท่าเทียมกันของรูปสามเหลี่ยม แนวคิดเรื่องการเคลื่อนที่ ดังที่เราเห็นข้างต้น ยังช่วยให้เราสามารถอธิบายเรื่องของเรขาคณิตได้
ในขณะเดียวกัน มีช่องว่างในคำจำกัดความของแนวคิดเรื่องความเท่าเทียมกันของตัวเลขและแนวคิดเรื่องการเคลื่อนไหว ในความเป็นจริง ตัวเลขที่เท่ากันถูกกำหนดไว้ (ในระดับ VI) เป็นตัวเลขที่สามารถรวมกันได้โดยการซ้อนทับ (เช่น การเคลื่อนไหว) การเคลื่อนที่ถูกกำหนดไว้ข้างต้นว่าเป็นการแปลงที่แปลงรูปหลายเหลี่ยม F1 และ F สองตัวจนมีรูปหลายเหลี่ยม F" ที่เป็นโฮโมเทติกเป็น F และเท่ากับ F1 จากนั้นมุมของรูปหลายเหลี่ยม F จะเท่ากับมุมของรูปหลายเหลี่ยม F" ตามลำดับ และ ด้านข้างของรูปหลายเหลี่ยม F นั้นเป็นสัดส่วนกับด้านข้างของรูปหลายเหลี่ยม F" ตามลำดับ แต่รูปหลายเหลี่ยม F มีมุมและด้านเท่ากันกับรูปหลายเหลี่ยม F1 ที่เท่ากัน ดังนั้น รูปหลายเหลี่ยม F1 และ F จึงคล้ายกันในแง่ที่ว่านี่คือ เข้าใจในหลักสูตรเรขาคณิตระดับ VIII
ในทางกลับกัน ให้รูปหลายเหลี่ยม F1 และ F มีมุมเท่ากันตามลำดับ และด้านของรูปหลายเหลี่ยมเป็นสัดส่วนตามลำดับ อัตราส่วนของด้านข้างของรูปหลายเหลี่ยม F1 ต่อด้านที่สอดคล้องกันของรูปหลายเหลี่ยม F จะแสดงด้วย k ต่อไป ให้เราแสดงด้วย F" ซึ่งเป็นรูปหลายเหลี่ยมที่ได้จาก F ด้วยโฮโมเทตีที่มีค่าสัมประสิทธิ์ k (และจุดศูนย์กลางของโฮโมเทตีใดๆ ในกรณีนี้ ตามทฤษฎีบท รูปหลายเหลี่ยม F" และ F1 จะมีด้านและมุมเท่ากัน ตามลำดับ กล่าวคือ รูปหลายเหลี่ยมเหล่านี้จะเท่ากัน ดังนั้น รูปหลายเหลี่ยม F1 และ F จะคล้ายกันในแง่ของคำจำกัดความของความคล้ายคลึงที่ให้ไว้ที่นี่
บทที่ II ความสัมพันธ์ระหว่างการเปลี่ยนแปลง
2.1 กำหนดการเปลี่ยนแปลงของระนาบ
การแปลงความสัมพันธ์ α คือการเปลี่ยนแปลงของระนาบที่แปลงทุกเส้นให้เป็นเส้นตรง และรักษาความสัมพันธ์ที่มีจุดแบ่งส่วน
ในรูปที่ 1: L"= α(L), A"=α(A), B"=α(B), C"=α(C)
|การเปลี่ยนแปลง - การเคลื่อนไหวและความคล้ายคลึงกัน - เป็นกรณีพิเศษของการแปลงความสัมพันธ์เนื่องจากเนื่องจากคุณสมบัติของการเคลื่อนไหวและความคล้ายคลึงกันจึงเป็นไปตามข้อกำหนดทั้งหมดสำหรับคำจำกัดความของการแปลงความสัมพันธ์
เราจะยกตัวอย่างการเปลี่ยนแปลงความสัมพันธ์ที่ไม่สามารถลดทอนลงจากการเปลี่ยนแปลงที่พิจารณาก่อนหน้านี้ได้ ด้วยเหตุนี้ อันดับแรกเราจะพิจารณาการฉายภาพขนานของเครื่องบินลงบนเครื่องบิน
ให้ระนาบได้รับ: w และ w1 ซึ่งเป็นเส้นตรง l (ทิศทางการออกแบบ) ไม่ขนานกับระนาบใด ๆ เหล่านี้ (รูปที่ 2) จุด Aєw เรียกว่าเส้นโครงของจุด A1єw1 ถ้า AA1||l เส้น AA1 เรียกว่าเส้นฉาย การออกแบบขนานเป็นการโยงระนาบ w1 เข้ากับ w
ให้เราสังเกตคุณสมบัติของการออกแบบแบบขนานดังต่อไปนี้
1) รูปภาพของเส้นใดๆ a1 เป็นเส้นตรง
ในความเป็นจริง เส้นที่ฉายจุดของเส้น a1 ก่อตัวเป็นระนาบ (มันผ่าน a1 ขนานกับ l) ซึ่งเมื่อตัดกับ w จะให้ภาพของเส้น a1 - เส้น a (รูปที่ 2)
2) ความสัมพันธ์ที่จุดแบ่งส่วนยังคงอยู่เช่น
(รูปที่ 2)มันจะตามมาจากทฤษฎีบททันทีเกี่ยวกับจุดตัดของด้านข้างของมุมด้วยเส้นคู่ขนาน
ให้เราดำเนินการสร้างตัวอย่างของการเปลี่ยนแปลงความสัมพันธ์โดยตรง
ลองใช้ระนาบ w สองชุดแล้วย้ายอันหนึ่งไปยังตำแหน่งอื่น w1 (รูปที่ 3) ตำแหน่งใหม่ของจุดใดๆ Аєw จะแสดงด้วย А1єw1 ตอนนี้เราฉายระนาบ w1 ในตำแหน่งใดตำแหน่งหนึ่งไปยัง w และเขียนแทนเส้นโครงของจุด A1 ด้วย A"
ผลที่ได้คือการเปลี่ยนแปลงของระนาบ w ไปสู่ตัวมันเอง ซึ่งในนั้น
- เนื่องจากคุณสมบัติสมมาตรของการฉายภาพแบบคู่ขนาน สำหรับการเปลี่ยนแปลงนี้ ทั้งสองข้อกำหนดของการแปลงความสัมพันธ์บางอย่างจึงเป็นไปตามที่พอใจ ดังนั้น การเปลี่ยนแปลงที่สร้างขึ้นในขณะนี้จึงเป็นความสัมพันธ์ระหว่างเปอร์สเปคทีฟ