Affin transzformációk a síkon. Az affin transzformációk inverz problémái vagy körülbelül egy gyönyörű képlet Az affin transzformációk típusai
Bármely komplex affin transzformáció több elemi affin transzformáció összetételeként is ábrázolható. Az elemzés azt mutatja, hogy a 2D grafikában négy elemi affin transzformáció létezik - forgatás, nyújtás, tükrözés, fordítás.
Fordulat.
Tekintsük egy tetszőleges pont elforgatását A az origó körül szöggel (6. ábra).
Az elemi affin transzformáció egy szöggel történő elforgatás.
Tól től analitikus geometria Ismeretes, hogy a forgatást a következő affin transzformáció írja le.
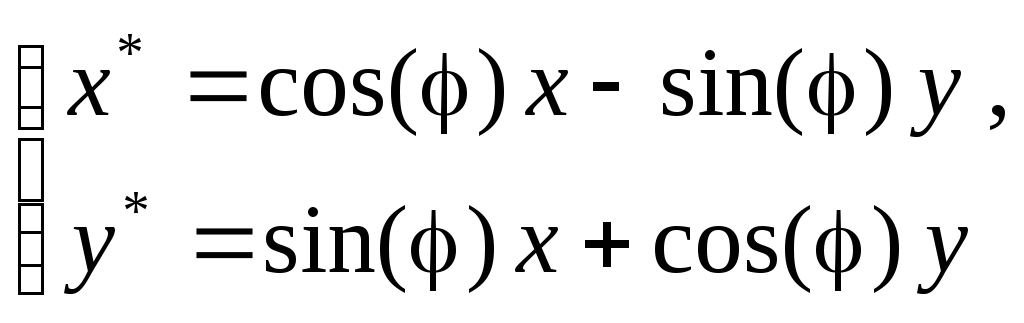 (5)
(5)
Kényelmes egy pont koordinátáit kétdimenziós vektor (oszlop) formájában kombinálni. Aztán a pontátmenet A pont pozícióba A
 (6)
(6)
Ebben a jelölésben a forgatás mátrixszorzásként fejezhető ki.
 (7)
(7)
Itt R– rotációs mátrix (Rotation). Ennek a mátrixnak a szerkezetét az (5) egyenletekből kapjuk meg.
 (8)
(8)
Nyújtás-kompresszió, pikkelyezés.
Tekintsük a nyújtás-sűrítés műveletét a koordinátatengelyek mentén nyújtási együtthatókkal k 1 ,k 2. Ezt a műveletet gyakran skálázásnak nevezik. Például mutassuk meg (7. ábra) egy olyan szakasz nyújtását, amelynek nyújtási együtthatója egyenlő  .
.

Elemi affin transzformáció - dilatáció együtthatókkal  .
.
A dilatációt a következő affin transzformáció írja le.
 (9)
(9)
A (9) transzformáció mátrixszorzásként fejezhető ki.
 (10)
(10)
Itt S– skálázó mátrix. Ennek a mátrixnak a szerkezetét a (9) egyenletekből kapjuk meg.
 (11)
(11)
Visszaverődés.
Tekintsük a tükrözés működését a koordinátatengelyekhez viszonyítva. Például mutassuk meg (8. ábra) a tengelyhez viszonyított visszaverődést x.

Elemi affin transzformáció – reflexió az Ox tengelyhez képest.
A tükrözést a következő affin transzformáció írja le.
 (12)
(12)
A (12) transzformáció mátrixszorzásként fejezhető ki.
 (13)
(13)
Itt M– reflexiós mátrix (Mirror – tükör, tükrözés). Ennek a mátrixnak a szerkezetét a (12) egyenletekből kapjuk meg.
 (14)
(14)
Hasonlóképpen megtaláljuk a reflexiós mátrixot a tengelyhez képest y.
 (15)
(15)
Átruházás.
Tekintsük az átviteli műveletet a transzlációs vektorba  . Ezzel a művelettel bármely tárgy torzítás nélkül mozog, és bármely oldal párhuzamos marad önmagával. Például a 9. ábrán egy szegmens átvitelét mutatjuk be.
. Ezzel a művelettel bármely tárgy torzítás nélkül mozog, és bármely oldal párhuzamos marad önmagával. Például a 9. ábrán egy szegmens átvitelét mutatjuk be.

Elemi affin transzformáció - átvitel transzlációs vektorba t .
Az átvitelt a következő affin transzformáció írja le.
 (16)
(16)
A (16) transzformációt mátrixszorzás típusú formában szeretnénk kifejezni.
 (17)
(17)
Itt T– fordítási mátrixnak kell lennie (Fordítás – fordítás, átvitel). Mátrixot azonban lehetetlen felépíteni T dimenzió 22, így a (16) és (17) egyenlet egyidejűleg teljesül.
És mégis, egy ilyen mátrix létrehozható, ha formálisan figyelembe vesszük az affin 2D transzformációkat a 3-dimenziós térben. Ehhez homogén koordinátákra kell lépnünk.
Homogén koordináták.
A homogén koordináták fogalma a projektív geometriából jutott el hozzánk. Legyen a lényeg A a síkon fekszik és vannak koordinátái ( x,y). Akkor homogén koordináták ez a pont az adott számokhoz tartozó x 1 , x 2 , x 3 számok tetszőleges hármasa xÉs y a következő kapcsolatokat.
 (18)
(18)
Számítógépes grafikai feladatok megoldása során általában a következő három számot választjuk homogén koordinátaként.
Így egy tetszőleges ponton A(x,y) a síkhoz pontot rendelnek A(x,y, 1) a térben. Lényegében a síkbeli affin transzformációkat vizsgáljuk z= 1, a 10. ábra szerint.

Affin transzformáció homogén koordinátákban.
A síkban fekvő pontok koordinátái z= 1 3-dimenziós vektorok formájában egyesül. Átmeneti pont A pont pozícióba A* vektortranszformációnak tekinthető.
 (20)
(20)
Ebben a jelölésben az általános affin transzformáció (1) kifejezhető mátrixszorzásként.
 (21)
(21)
Itt a mátrix P a 33 dimenzió az általános affin transzformáció (1) mátrixa, és ennek a formája.
 (22)
(22)
Jegyezzünk meg egy fontos pontot , homogén koordinátákkal társítva. A háromdimenziós vektorokra és mátrixokra (20, 21, 22) való áttérés teljesen formálisan végrehajtható anélkül, hogy a valós háromdimenziós térhez (x,y,z) kötnénk. Ez a megközelítés lehetővé teszi homogén koordináták bevezetését a 3D affin transzformációkhoz és mátrixszorzások végrehajtását 4-dimenziós vektortérben.
Az elemi affin transzformációk korábban bevezetett mátrixai homogén koordinátákban a következő formát öltik majd.
Forgatási mátrix R homogén koordinátákban a következő alakú lesz.
 (23)
(23)
Stretch Mátrix S a következőképpen fog változni.
 (24)
(24)
Reflexiós mátrixok M a koordinátatengelyekhez viszonyítva a következő alakkal fog rendelkezni.
 (25)
(25)
Transzfer Mátrix T vektort sugározni  homogén koordinátákban a következő alakú lesz.
homogén koordinátákban a következő alakú lesz.
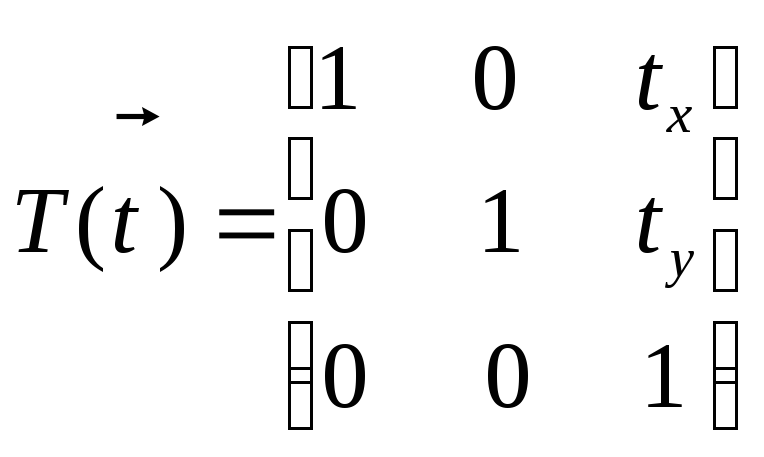 (26)
(26)
Az affin transzformáció olyan, amely megőrzi a vonalak párhuzamosságát, de nem feltétlenül a szögeket vagy a hosszúságokat.
A számítógépes grafikában mindent, ami a kétdimenziós esethez tartozik, általában a 2D (2-dimenziós) szimbólummal jelöljük. Tegyük fel, hogy egy egyenes koordinátarendszert vezetünk be a síkon. Ezután minden M ponthoz hozzárendeljük a koordinátáiból egy rendezett számpárt (x, y) (1. ábra).
A fenti képleteket kétféleképpen tekinthetjük: vagy megmarad a pont és megváltozik a koordinátarendszer, ilyenkor egy tetszőleges M pont változatlan marad, csak a koordinátái (x, y) (x*, y*) változnak, ill. a pont megváltozik és a koordinátarendszer ebben az esetben megmarad Ebben az esetben a képletek olyan leképezést határoznak meg, amely egy tetszőleges M(x, y) pontot visz egy M*(x*, y*) pontba, melynek koordinátái ugyanabban a koordináta-rendszerben van meghatározva. A képleteket a jövőben általában úgy fogjuk értelmezni, hogy a sík pontjait egy adott egyenes koordinátarendszerben transzformáljuk.
A sík affin transzformációiban kiemelt szerepe van több fontos speciális esetnek, amelyek jól követhető geometriai jellemzőkkel rendelkeznek. A numerikus együtthatók geometriai jelentésének tanulmányozásakor a képletekben ezekre az esetekre célszerű feltételezni, hogy az adott koordinátarendszer derékszögű derékszögű.
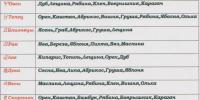
A leggyakrabban használt számítógépes grafikai technikák a következők: fordítás, skálázás, forgatás, tükrözés. Az ezeket a transzformációkat magyarázó algebrai kifejezéseket és ábrákat az 1. táblázat foglalja össze.
Affin transzformációk a síkon
Az átvitelen a kimeneti primitívek eltolását értjük ugyanarra a vektorra.
A méretezés a teljes kép vagy annak egy részének nagyítását vagy kicsinyítését jelenti. Méretezéskor a képpontok koordinátáit megszorozzuk egy bizonyos számmal.
A forgatás a kimeneti primitívek adott tengely körüli elforgatását jelenti. (A rajzsíkban az elforgatás egy pont körül történik.)
A tükrözés azt jelenti, hogy egy kép tükörképét kapjuk az egyik tengelyhez (például X) képest.
A négy speciális eset kiválasztását két körülmény határozza meg:
1. A fenti transzformációk mindegyikének egyszerű és világos geometriai jelentése van (a fenti képletekben szereplő állandó számok is geometriai jelentéssel rendelkeznek).
2. Amint az analitikus geometria során bebizonyosodott, a (*) alak bármely transzformációja mindig ábrázolható az A, B, C és D forma (vagy ezek részei) legegyszerűbb transzformációinak szekvenciális végrehajtásaként (szuperpozíciójaként). átalakulások).
Így a sík affin transzformációinak a következő fontos tulajdonsága igaz: bármely (*) alakú leképezés leírható az A, B, C és D képletekkel meghatározott leképezésekkel.
Ahhoz, hogy ezeket a jól ismert képleteket számítógépes grafikai feladatokban hatékonyan használhassuk, kényelmesebb a mátrixjelölésük.
Ezen transzformációk kombinálásához homogén koordinátákat vezetünk be. Egy pont homogén koordinátái az egyidejűleg nullától eltérő x1, x2, x3 számok hármasa, amelyek adott x és y számokhoz kapcsolódnak a következő összefüggésekkel:
Ekkor az M(x, y) pontot M(hX, hY, h) alakban írjuk fel, ahol h 0 a léptéktényező. A kétdimenziós derékszögű koordináták megtalálhatók, mint
A projektív geometriában ezek a koordináták azért vannak bevezetve, hogy kiküszöböljék azokat a bizonytalanságokat, amelyek végtelenül távoli (nem megfelelő) elemek megadásakor merülnek fel. A homogén koordináták úgy értelmezhetők, mint egy h tényezővel skálázott sík beágyazása a Z= h síkra háromdimenziós térben.
A homogén koordinátákban lévő pontokat háromelemű sorvektorokba írjuk. A transzformációs mátrixoknak 3x3 méretűnek kell lenniük.
A homogén koordináták hármasainak és harmadrendű mátrixainak felhasználásával egy sík bármely affin transzformációja leírható.
Valójában h = 1-et feltételezve hasonlítsunk össze két bejegyzést: a (*) szimbólummal jelöltet és a következő mátrixot:
Most már használhatja a transzformációk összetételét, egyetlen eredőt használva az egymást követő transzformációk sorozata helyett. Egy összetett problémát például több egyszerűre bonthat. Az A pont elforgatása egy tetszőleges B pont körül három feladatra osztható:
transzfer, amelyben B = 0 (ahol 0 az origó);
fordulat;
fordított átvitel, amelyben a B pont visszatér a helyére stb.
A T, D, R, M műveletek legáltalánosabb összetételének mátrixa van:
Felső rész 2x2 méretű - kombinált forgatási és skálázási mátrix, valamint a tx és ty a teljes fordítást írja le.
A felvázolt alapvető átalakítások a következők:
görgetés ablak mozgatása a renderelési felületen (ha a mozgás csak felfelé és lefelé korlátozódik, akkor ezt függőleges görgetésnek nevezzük);
zoomolás a képlépték fokozatos változása;
bukfenc egy bizonyos tengely körül forgó kimeneti primitívek dinamikus képe, amelyek tájolása a térben folyamatosan változik;
Pán a kép fokozatos átvitele a mozgás vizuális érzetének megteremtése érdekében.
UDC 004.932
Kudrina M.A., Murzin A.V.
Szövetségi Állami Költségvetési Felsőoktatási Szakmai Oktatási Intézmény „Ak. S. P. Korolev (Nemzeti Kutatóegyetem) nevéről elnevezett Szamara Állami Repülési Egyetem”, Szamara, Oroszország
OBJEKTUMOK AFFIN TRANSFORMÁCIÓI A SZÁMÍTÓGÉPES GRAFIKÁBAN
Az egyik tipikus rasztergrafikával megoldandó feladat mind a teljes kép egészének, mind annak egyes töredékeinek átalakítása, mint például mozgás, adott középpont körüli forgatás, lineáris méretek megváltoztatása stb.
Ezt a problémát affin transzformációk segítségével oldják meg.
Az affin transzformációk nagyon hasznosak lehetnek a következő helyzetekben:
1. Lapos kép vagy háromdimenziós jelenet megkomponálása azonos típusú elemek elrendezésével, másolásával, átalakításával és a kép különböző helyeire való mozgatásával. Például szimmetrikus objektumok, például hópehely létrehozásához. Kifejleszthet egy motívumot, majd ennek a motívumnak a tükrözésével, forgatásával és mozgatásával képet alkothat a teljes tárgyról.
2. Háromdimenziós objektumok különböző perspektívákból való megtekintésére. Ebben az esetben rögzítheti a kamera pozícióját és elforgathatja a jelenetet, vagy fordítva, mozdulatlanul hagyhatja a jelenetet és mozgathatja körülötte a kamerát. Az ilyen manipulációkat háromdimenziós affin transzformációkkal lehet végrehajtani.
3. Háromdimenziós objektumok síkra vetítése és a jelenet ablakban való megjelenítése. Így például az axonometrikus vetítéshez a vetítési sík két elforgatásából álló sorozatot használjuk, az ablakban való megjelenítéshez pedig a méretezés és a transzláció kombinációját.
Affin transzformációk a síkon Általános nézet a következő képletekkel írják le:
J X = Ax + By + C, . A program lehetővé teszi a tesztfeladatok összeállításának folyamatának automatizálását.
IRODALOM
1. Porev V.N. Számítógépes grafika. - Szentpétervár: BHV-Petersburg, 2002. - 432 p. : ill.
2. Hill F. Open GL. Számítógépes grafikai programozás. Szakembereknek. - Szentpétervár: Péter,
2002. - 1088 p.: ill. ISBN 5-318-00219-6
3. Kudrina M.A., Kudrin K.A., Vytyagov A.A., Ionov D.O. Rendszerfejlesztés távoktatás a "Számítógépes grafika" kurzushoz Moodle segítségével: Megbízhatóság és minőség nemzetközi szimpózium anyaga. 2010. T. I. P. 165.
4. Kudrina M.A., Kudrin K.A., Degtyareva O.A. Tanúsító pedagógiai mérőanyag a "Számítógépes grafika" kurzushoz // Megbízhatóság és minőség 2008. Proceedings of the International. szimpózium. Penza, 2008, 162-163.
5. Kudrina M.A. Tanfolyamhoz tanúsító és pedagógiai mérőanyagok használata
"Számítógépes grafika" az oktatási folyamatban"//Oktatás - befektetések a sikerbe: Tudományos anyagok -
Az alatta \(f\) egy affin transzformációt jelöl a \(O, \boldsymbol(e)_(1), \boldsymbol(e)_(2)\) derékszögű koordinátarendszerben a képletekkel
$$
x^(*)=a_(1)x+b_(1)y+c_(1),\ y^(*)=a_(2)x+b_(2)y+c_(2).\label( ref1)
$$
tekintettel arra
$$
\begin(vmátrix)
a_(1) és b_(1)\\
a_(2) és b_(2)
\end(vmatrix) \neq 0.\label(ref2)
$$
Tekintsünk egy egyenest a síkon a \(\boldsymbol(r)=\boldsymbol(r)_(0)+\boldsymbol(a)t\) egyenlettel, és keressük meg a képét a \(f\) transzformáció alatt. (Egy vonal képén a pontjainak képeinek halmazát értjük.) Egy tetszőleges \(M\) pont képének \(M^(*)\) sugárvektora a következőképpen számítható ki:
$$
\overrightarrow(OM^(*))=\overrightarrow(Of(O))+f\overrightarrow((O)M^(*))=\boldsymbol(c)+f(\boldsymbol(r)).\nonumber
$$
Itt a \(\boldsymbol(c)\) egy konstans vektor \(\overrightarrow(Of)(O)\), a \(\boldsymbol(r)\) pedig a \(M\) pont sugárvektora. A (11) §2 szerint kapjuk
$$
\overrightarrow(OM^(*))=\boldsymbol(c)+f(\boldsymbol(r)_(0))+f(\boldsymbol(a))t.\label(ref3)
$$
Mivel a \(f\) egy affin transzformáció és a \(\boldsymbol(a) \neq \boldsymbol(0)\), akkor a \(\boldsymbol(a)\) a \(f(\boldsymbol() vektorba kerül a) ) \neq 0\), a \eqref(ref3) egyenlet pedig egy egyenes egyenlete. Tehát a \(\boldsymbol(r)=\boldsymbol(r)_(0)+\boldsymbol(a)t\) vonal összes pontjának képe a \eqref(ref3) egyenesen található.
Ezenkívül a \(f\) transzformáció meghatározza az egyik vonal egy-egy leképezését a másikhoz, mivel a kezdeti pontok és az irányvektorok itt végzett megválasztásával a \(M^(*)\) pont ugyanaz. érték a \eqref(ref3) sorban lévő \(t\) paraméterben, ugyanaz, mint az eredeti sorban lévő \(M\) pont. Innen kapjuk az első állítást.
1. állítás.
Affin transzformációval:
- az egyenes egyenessé válik;
- egy szegmens szegmensbe megy;
- párhuzamos egyenesek párhuzamosakká válnak.
Bizonyíték.
A második állítás bizonyításához elég megjegyezni, hogy egy egyenes szakasz olyan pontokból áll, amelyek paraméterértékei kielégítik a \(t_(1) \leq t \leq t_(2)\) alakú egyenlőtlenséget. A harmadik állítás abból következik, hogy affin transzformáció során a kollineáris -edik vektorok kollineárissá válnak.
2. állítás.
Egy affin transzformáció során a párhuzamos szakaszok hosszának aránya nem változik.
Bizonyíték.
Legyenek párhuzamosak az \(AB\) és \(CD\) szegmensek. Ez azt jelenti, hogy van egy \(\lambda\) szám, így \(\overrightarrow(AB)=\lambda \overrightarrow(CD)\). A \(\overrightarrow(AB)\) és \(\overrightarrow(CD)\) vektorok képei ugyanazzal a függéssel kapcsolódnak egymáshoz \(\overrightarrow(A^(*)B^(*))=\lambda \ jobbra nyíl(C^( *)D^(*))\). Ebből az következik, hogy
$$
\frac(|\overrightarrow(AB)|)(|\overrightarrow(CD)|)=\frac(|\overrightarrow(A^(*)B^(*))|)(|\overrightarrow(C^(*) )D^(*))|)=|\lambda|.\nonumber
$$
Következmény.
Ha egy \(C\) pont felosztja az \(AB\) szakaszt valamilyen \(\lambda\) relációban, akkor a \(C^(*)\) képe felosztja a \(A^(*)B^ képet (*) \) szegmens \(AB\) ugyanabban a relációban \(\lambda\).
Területváltás az affin transzformáció során.
Először is vessünk egy pillantást. Válasszunk egy általános derékszögű koordinátarendszert \(O, \boldsymbol(e)_(1), \boldsymbol(e)_(2)\) és jelöljük \((p_(1), p_(2)) \) és \ ((q_(1), q_(2))\) komponensei azon \(\boldsymbol(p)\) és \(\boldsymbol(q)\) vektoroknak, amelyekre épül. A paralelogramma területét a következő módszerrel számíthatjuk ki:
$$
S_(\pm)=S_(\pm) (\boldsymbol(p), \boldsymbol(q))=(p_(1)q_(2)-p_(2)q_(1)) S_(\pm) ( \boldsymbol(e)_(1), \boldsymbol(e)_(2)).\nonumber
$$
Írjuk be a \(f\) affin transzformációt a kiválasztott koordinátarendszerbe a \eqref(ref1) képletekkel. A korábban bebizonyítottakból következik, hogy a \(f(\boldsymbol(p))\) és \(f(\boldsymbol(q))\) vektorok \(f(\boldsymbol(e)_(1)) alapjukban az f(\boldsymbol(e)_(2))\) ugyanazok a komponensek \((p_(1), p_(2))\) és \((q_(1), q_(2)) \) ez és a \(\boldsymbol(p)\) és \(\boldsymbol(q)\) vektorok a \(\boldsymbol(e)_(1), \boldsymbol(e)_(2)\ ). A paralelogramma képe a \(f(\boldsymbol(p))\) és \(f(\boldsymbol(q))\) vektorokra épül fel, területe egyenlő
$$
S_(\pm)^(*)=S_(\pm) (f(\boldsymbol(p)), f(\boldsymbol(q)))=(p_(1)q_(2)-p_(2)q_ (1)) S_(\pm) (f(\boldsymbol(e)_(1)), f(\boldsymbol(e)_(2))).\nonumber
$$
Számítsuk ki az utolsó tényezőt. A már bebizonyítottakból tudjuk, hogy a \(f(\boldsymbol(e)_(1)), f(\boldsymbol(e)_(2)\) vektorok koordinátái egyenlőek, \ ((a_(1), a_( 2))\) és \((b_(1), b_(2))\). Ezért \(S_(\pm) (f(\boldsymbol(e)_(1)), f(\boldsymbol(e)_(2)))=(a_(1)b_(2)-a_(2) b_(1)) S_(\pm) (\boldsymbol(e)_(1), \boldsymbol(e)_(2)\) és
$$
S_(\pm)^(*)=(p_(1)q_(2)-p_(2)q_(1))(a_(1)b_(2)-a_(2)b_(1)) S_( \pm) (\boldsymbol(e)_(1), \boldsymbol(e)_(2)).\nonumber
$$
Innentől azt látjuk
$$
\frac(S_(\pm)^(*))(S_(\pm))=\begin(vmátrix)
a_(1) és b_(1)\\
a_(2) és b_(2)
\end(vmátrix).\label(ref4)
$$
Így az orientált paralelogramma képének és a paralelogramma területének aránya minden paralelogramma esetében azonos, és egyenlő \(a_(1)b_(2)-a_(2)b_ (1)\).
Ebből az következik, hogy ez a determináns nem függ attól, hogy melyik koordinátarendszerben a transzformációt írjuk, bár a koordinátarendszertől függő együtthatókból számítjuk. Ez a mennyiség a transzformáció geometriai tulajdonságát kifejező invariáns.
Az \eqref(ref4) képletből egyértelmű, hogy egy orientálatlan paralelogramma képének területének aránya a területéhez egyenlő
$$
S^(*)/S=|a_(1)b_(2)-a_(2)b_(1)|.\label(ref5)
$$
Ha \(a_(1)b_(2)-a_(2)b_(1) > 0\, akkor az összes orientált paralelogramma tájolása megmarad a transzformáció során, és ha \(a_(1)b_(2) -a_(2)b_(1)< 0\), то для каждого ориентированного параллелограмма ориентация образа противоположна его ориентации.
Foglalkozzunk most más figurák területeivel. Mindegyik háromszög meghosszabbítható egy paralelogramma kialakítására, amelynek területe kétszerese a háromszög területének. Ezért a háromszög képének területének aránya ennek a háromszögnek a területéhez viszonyítva kielégíti az \eqref(ref5) egyenlőséget.
Minden sokszög háromszögekre osztható. Ezért a \eqref(ref5) képlet tetszőleges sokszögekre is érvényes.
Itt nem térünk ki egy tetszőleges görbe vonalú alak területének meghatározására. Csak annyit mondunk, hogy azokban az esetekben, amikor ez a terület definiálva van, akkor egyenlő a vizsgált ábrába írt bizonyos sokszögsorozat területének határával. A korlátok elméletéből ismert a következő feltevés: ha az \(S_(n)\) sorozat a \(S\) határig tart, akkor a \(\delta S_(n)\) sorozat, ahol \(\ delta\) állandó, hajlamos a \(\delta S\) korlátozására. Ezen javaslat alapján arra a következtetésre jutottunk, hogy a \eqref(ref5) képlet a legáltalánosabb esetben érvényes.
Példaként keressük meg egy ellipszis területének kifejezését a féltengelyei alapján. Korábban már megjegyeztük, hogy \(a\) és \(b\) féltengelyű ellipszist kaphatunk, ha egy \(a\) sugarú kört a középpontján átmenő egyenessé tömörítünk. A tömörítési arány \(b/a\). Az egyikben a \(x^(*)=x\), \(y^(*)=\lambda y\) egyenesre való tömörítés koordináta rekordját kaptuk. Az együtthatók determinánsa ezekben a képletekben egyenlő \(\lambda\), azaz esetünkben \(b/a\). Így az ellipszis területének és a kör területének aránya \(b/a\), és ez a terület \(S=(b/a)\pi a^(2)\ ). Végre megvan
$$
S=\pi ab.\nonumber
$$
Másodrendű sorok képei.
Láttuk, hogy az egyenesből egyenes lesz. Ez a következő állítás speciális esete.
3. állítás.
Az affin transzformáció egy algebrai vonalat azonos sorrendű algebrai egyenessé alakít át.
Bizonyíték.
Valójában legyen a \(L\) egyenesnek a derékszögű koordinátarendszerben \(O, \boldsymbol(e)_(1), \boldsymbol(e)_(2)\) \(p) sorrendű algebrai egyenlete \). Azt már tudjuk, hogy az \(L\) egyenes összes pontjának képei az \(f\) affin transzformáció alatt a \(f(O), f(\boldsymbol(e)_(1)) koordinátarendszerben szerepelnek. , f(\boldsymbol( e)_(2))\) ugyanazok a koordináták, mint az inverz képeik a \(O, \boldsymbol(e)_(1), \boldsymbol(e)_(2) koordinátarendszerben \). Következésképpen a \(f(O), f(\boldsymbol(e)_(1)), f(\boldsymbol(e)_(2)\) rendszerben lévő képek koordinátái ugyanazzal függenek össze. algebrai egyenlet sorrend \(p\). Ez elég ahhoz, hogy levonjuk a szükséges következtetést.
A fentebb bizonyított állításból különösen az következik, hogy egy affin transzformáció során egy másodrendű sorból másodrendű sor lesz. Erősebb állítást fogunk bizonyítani. Mint már tudjuk, a másodrendű sorok feloszthatók. Látni fogjuk, hogy a vonal osztálya megmarad az affin transzformáció során. Ennek alapján az említett tételben felsorolt vonalosztályokat affin osztályoknak nevezzük. Tehát bizonyítsunk be egy új állítást.
4. állítás.
Az affin osztályok valamelyikébe tartozó másodrendű sor csak bármilyen affin transzformáció esetén tud azonos osztályú sorrá átalakulni. Minden másodrendű sor átalakítható megfelelő affin transzformációval ugyanabban az affin osztályban lévő bármely másik vonalra.
Bizonyíték.
Egy egyenest korlátosnak nevezünk, ha egy paralelogrammán belül van. Könnyen belátható, hogy affin transzformációval a korlátos vonalnak korlátossá, a korlátlannak pedig határtalanná kell válnia.
- Az ellipszis egy korlátos másodrendű egyenes. Az ellipsziseken kívül csak az egy pontból álló egyenesek, vagyis egy képzeletbeli metsző egyenespár korlátozottak. Mivel egy ellipszis korlátozott és több pontból áll, csak ellipszissé tud átalakulni.
- A hiperbolának két külön ága van. Ezt a tulajdonságot úgy is meg lehet fogalmazni, hogy az affin transzformációk alatti változatlansága egyértelmű legyen. Létezik ugyanis olyan egyenes, amely nem metszi a hiperbolát, hanem metszi annak néhány húrját Az összes másodrendű egyenes közül csak a hiperbolák és a párhuzamos egyenespárok rendelkeznek ezzel a tulajdonsággal. A hiperbola ágai nem egyenesek, ezért affin transzformáció esetén csak hiperbolává alakulhat át.
- A parabola egy korlátlan, másodrendű vonal, amely egy nem egyenes vonalú darabból áll. Egyetlen más másodrendű vonal sem rendelkezik ezzel a tulajdonsággal, ezért a parabola csak parabolává alakulhat át.
- Ha egy másodrendű egyenes egy pontot (egy képzeletbeli metsző egyenespárt), egy egyenest (egy pár egybeeső egyenest), egy metsző egyenespárt vagy egy párhuzamos egyenespárt ábrázol, akkor az affin transzformációk korábban bizonyított tulajdonságaiból ez következik. hogy ez a sor nem alakulhat át semmilyen más osztály sorává.
Bizonyítsuk be az állítás második részét. Abban, amit már bebizonyítottunk kanonikus egyenletek a másodrendű sorok derékszögű derékszögű koordinátarendszerben vannak felírva, és paramétereket tartalmaznak \(a, b, …\) Ha elhagyjuk a bázis ortonormalását, további egyszerűsítéseket végezhetünk a kanonikus egyenleteken, és olyan formába hozhatjuk őket, nem tartalmaz paramétereket. Például a \(x'=x/a\), \(y'=y/b\) koordináták lecserélése átalakítja a \(x^(2)a^(2)+y^(2)b ellipszis egyenletet ^(2 )=1\) az \(x'^(2)+y'^(2)=1\) egyenletbe, bármi legyen is \(a\) és \(b\). (Az utolsó egyenlet nem egy kör egyenlete, mivel új rendszer A koordináták nem derékszögűek.)
Az olvasó könnyen megmutathatja, hogy a másodrendű egyenesek kanonikus egyenletei megfelelő koordináta-rendszerre lépve a következő egyenletekre alakíthatók:
- \(x^(2)+y^(2)=1\);
- \(x^(2)+y^(2)=0\);
- \(x^(2)-y^(2)=1\);
- \(x^(2)-y^(2)=0\);
- \(y^(2)=2x\);
- \(y^(2)-1=0\);
- \(y^(2)=0\).
Az ilyen koordinátarendszert affin kanonikus koordinátarendszernek nevezzük.
A korábbiakból következik, hogy egy affin transzformáció, amely egyazon affin osztály két sorának affin kanonikus koordinátarendszerét egyesíti, ezeket a sorokat is kombinálja. Ezzel teljes a bizonyítás.
Ortogonális transzformációs dekompozíció.
1. tétel.
Minden ortogonális transzformációt párhuzamos transzláció, elforgatás és esetleg axiális szimmetria szorzatára bomlik fel.
Bizonyíték.
Legyen \(f\) ortogonális transzformáció, \(\vartriangle ABC\) pedig egyenlő szárú derékszögű háromszög derékszöggel \(A\). A \(f\) átalakítása során egy egyenlő háromszöggé alakul \(\vartriangle A^(*)B^(*)C^(*)\), amelynek derékszöge az \(A^(*) csúcsban van \). A tétel bizonyítást nyer, ha \(p\), \(q\) forgatás és (ha szükséges) tengelyszimmetria \(r\) szekvenciális párhuzamos fordításával kombinálhatjuk az \(ABC\) és \( A^ (*)B^(*)C^(*)\). Valójában a \(rqp\) szorzat egy affin transzformáció, csakúgy, mint az \(f\), és az affin transzformációt egyértelműen három pont képei határozzák meg, amelyek nem ugyanazon az egyenesen helyezkednek el. Ezért \(rqp\) egybeesik \(f\)-vel.
Tehát vigyük át \(A\) és \(A^(*)\) párhuzamos átvitellel \(p\) a \(\overrightarrow(AA^(*))\) vektorba (ha \(A=A) ^(* )\), akkor \(p\) az azonosságtranszformáció). Ezután a \(q\) \(A^(*)\ pont körüli elforgatásával a \(p(B)\) kompatibilis a \(B^(*)\)-val (talán ez a transzformáció is azonos lesz ). A \(q(p(C))\) pont vagy egybeesik \(C^(*)\) ponttal, vagy szimmetrikus vele az \(A^(*)B^(*)\ ). Az első esetben a célt már elértük, a másodikban pedig a megadott egyeneshez viszonyított tengelyirányú szimmetriára lesz szükség. A tétel bizonyítást nyert.
Nem szabad megfeledkezni arról, hogy az ortogonális transzformáció eredő kiterjesztése nem egyedi. Sőt, egy forgás vagy párhuzamos transzláció felbontható axiális szimmetriák szorzatára, a párhuzamos transzláció és elforgatás szorzata egy forgásként ábrázolható, és így tovább. Nem határozzuk meg, hogyan kell ezt megtenni, de tisztázzuk az összes ilyen bővítés alábbi általános tulajdonságait.
5. állítás.
Egy ortogonális transzformáció tetszőleges számú párhuzamos transzláció, elforgatás és tengelyes szimmetria szorzatává történő kiterjesztéséhez a bővítésben szereplő tengelyirányú szimmetriák számának paritása azonos.
Bizonyíték.
Ennek bizonyításához fontolja meg a repülőn önkényes alaponés kövesse az orientációjának változását (a legrövidebb forgás iránya \(\boldsymbol(e)_(1)\)-ről \(\boldsymbol(e)_(2)\)-ra) az elvégzett transzformációk során. Vegyük észre, hogy a forgatás és a párhuzamos transzláció nem változtatja meg egyetlen bázis orientációját sem, de az axiális szimmetria bármely bázis orientációját megváltoztatja. Ezért, ha egy adott ortogonális transzformáció megváltoztatja a bázis orientációját, akkor annak bármely kiterjesztésének páratlan számú tengelyes szimmetriát kell tartalmaznia. Ha a bázis orientációja nem változik, akkor a bővítésben szereplő tengelyszimmetriák száma csak páros lehet.
Meghatározás.
A párhuzamos transzláció és forgatás szorzatára bontható ortogonális transzformációkat nevezzük az első típusú ortogonális transzformációk , és a többi - a második típusú ortogonális transzformációk .
Egy derékszögű derékszögű koordinátarendszerben egy ortogonális transzformációt írunk le:
$$
\begin(tömb)(cc)
\end(tömb).\nonumber
$$
A \(y\) együtthatók felső előjeleivel ezekben a képletekben az együtthatókból álló determináns +1, az alsó előjeleknél pedig -1. Innen és az \eqref(ref4) képletből a következő utasítás következik.
6. állítás.
Az első típusú ortogonális transzformációt egy derékszögű derékszögű koordinátarendszerben írjuk le a képletekkel
$$
\begin(tömb)(cc)
& x^(*)=x \cos \varphi \mp y \sin \varphi+c_(1),\\
& y^(*)=x \sin \varphi \pm y \cos \varphi+c_(2).
\end(tömb).\nonumber
$$
felső jelekkel az \(y\) együtthatókhoz, és egy második típusú ortogonális transzformációval - alsó előjelekkel.
Egy affin transzformáció lebontása.
Láttuk, hogy egy affin transzformáció mennyire képes megváltoztatni egy síkot: egy körből ellipszis, egy szabályos háromszögből teljesen önkényes. Úgy tűnik, hogy a szögeket nem lehet megőrizni. A következő állítás azonban igaz
7. állítás.
Minden affin transzformációhoz két egymásra merőleges egyenes tartozik, amelyek egymásra merőleges vonalakká alakulnak.
Bizonyíték.
Ennek bizonyítására tekintsünk egy kört. Ezzel az affin transzformációval ellipszissé válik. Mindegyik ellipszistengely a másik tengellyel párhuzamos húrok felezőpontjainak halmaza. Az affin transzformáció során az akkord akkorddá alakul, a párhuzamosságot meg kell őrizni, és a szakasz felezőpontja átalakul a képének felezőpontjává. Ezért az ellipszistengelyek prototípusai olyan szakaszok, amelyeknek ugyanaz a tulajdonsága: mindegyik egy másik szegmenssel párhuzamos kör húrjainak felezőpontjainak halmaza. Az ilyen szakaszok minden bizonnyal a kör két egymásra merőleges átmérője. Erre volt szükségünk: a körnek két egymásra merőleges átmérője van, amelyek egymásra merőleges szakaszokká alakulnak át - az ellipszis tengelyeivé.
Érdemes megjegyezni egy speciális esetet: egy affin transzformáció alatt lévő kör körré alakulhat. Ebben az esetben ugyanez az érvelés vonatkozik a körkép bármely két egymásra merőleges átmérőjére. Nyilvánvaló, hogy ebben az esetben bármely két egymásra merőleges irány merőleges marad.
Meghatározás.
Két egymásra merőleges irányt egy affin transzformáció fő- vagy szinguláris irányának nevezünk \(f\), ha kölcsönösen merőleges irányokká alakulnak át.
2. tétel.
Minden affin transzformációt egy ortogonális transzformáció és két egymásra merőleges egyenesre történő tömörítés szorzatára bontunk.
Bizonyíték.
A bizonyítás hasonló a bizonyításhoz. Tekintsük az \(f\) affin transzformációt, és válasszunk egy egyenlő szárú derékszögű háromszöget \(ABC\) úgy, hogy \(AB\) és \(AC\) szárai a \(f\) transzformáció fő irányai mentén legyenek. Jelöljük \(A^(*)\), \(B^(*)\) és \(C^(*)\) a csúcsainak képeit. Végezzünk ortogonális \(g\) transzformációt úgy, hogy \(g(A)=A^(*)\), és a \(g(B)\) és \(g(C)\) pontok rendre a \(A^(*)B^(*)\) és \(A^(*)C^(*)\) sugarakon. (Ez könnyen elérhető, mint az 1. Tételben, párhuzamos transzlációval, elforgatással és axiális szimmetriával.)
Legyen \(\lambda=|A^(*)B^(*)|/|A^(*)g(B)|\), a \(\mu=|A^(*)C^(*) |/|A^(*)g(C)|\). Ekkor a \(p_(1)\) összehúzása a \(A^(*)C^(*)\) sorba a \(\lambda\) relációban a \(g(B)\)-t \-vé alakítja (p_(1) g(B)=B^(*)\), és nem tolja el a \(A^(*)\) és \(g(C)\) pontokat. Hasonlóképpen a \(p_(2)\) összehúzása a \(A^(*)B^(*)\) sorba a \(g(C)\) alakot \(p_(2)g(C)= alakra alakítja C^ (*)\), és nem tolja el az \(A^(*)B^(*)\) vonal pontjait.
Ez azt jelenti, hogy a \(p_(2)p_(1)g\) szorzat a \(A\), \(B\) és \(C\) pontokat a \(A^(*)\) pontba viszi. , \ (B^(*)\) és \(C^(*)\), valamint a nekünk adott \(f\) transzformáció. A korábban bebizonyítottak szerint szükség szerint \(p_(2)p_(1)g=f\).
I. fejezet A geometriai transzformáció fogalma
1.1 Mi a geometriai transzformáció?
Az axiális szimmetria, a centrális szimmetria, a forgatás, a párhuzamos transzformáció, a homotétia abban a közös, hogy mindegyik F alakzatot „átalakítja” valamilyen új F1 alakzattá, ezért ezeket geometriai transzformációknak nevezzük.
Általánosságban a geometriai transzformáció bármely olyan szabály, amely lehetővé teszi, hogy a síkon minden A pont egy új A pontot jelezzen, amelybe az A pont kerül át a szóban forgó transzformációval. Ha a síkon adott F ábra, akkor a halmaz Az összes olyan pont közül, amelyre F vékony alakjai átmennek a vizsgált transzformációba, egy új F alakot jelent. Ebben az esetben azt mondjuk, hogy F"-et kapunk F-ből a vizsgált transzformáció segítségével.
Példa. Az l egyenes szimmetriája egy geometriai transzformáció. A szabály, amely ebben az esetben lehetővé teszi a megfelelő A" pont megtalálását egy A" pontból, a következő: A pontból egy AP merőlegest leeresztünk egy l egyenesre, és a P ponton túli meghosszabbításán az RA" = szakaszt. AP-t elbocsátják.
Geometriai transzformációk hozzáadása
Tegyük fel, hogy két geometriai transzformációt vizsgálunk, amelyek közül az egyiket „elsőnek”, a másikat „másodiknak” nevezzük. Vegyünk egy tetszőleges A pontot a síkon, és jelöljük A"-val azt a pontot, ahová A megy az első transzformáció során. Az A" pontot viszont a második transzformáció átviszi valamilyen új A pontba. Más szóval, az A" pont. Az A pontból két transzformáció – először az első, majd a második – egymás utáni alkalmazásával kapjuk meg.
A két transzformáció szekvenciális végrehajtásának eredménye egyben geometriai transzformáció is: az A pontot viszi A pontba." Ezt az „eredményül kapott" transzformációt az első és a második figyelembe vett transzformáció összegének nevezzük.
Legyen adott egy F alak a síkon. Az első transzformáció valamilyen F" alakká alakítja át. A második transzformáció ezt az F" alakot valamilyen új F alakzattá alakítja. Az első és a második transzformáció összege az F ábrát azonnal F ábrává alakítja."
Példa. Legyen az első transzformáció szimmetria az O1 pont körül, a második transzformáció pedig egy másik O2 pont körüli szimmetriát. Keressük ennek a két transzformációnak az összegét.
Legyen A tetszőleges pont a síkon. Először tegyük fel, hogy az A pont nem az O1O2 egyenesen fekszik. Jelöljük A"-val a pontot szimmetrikus pont Egy az O1-hez képest, és A"-n keresztül - az A" pontra szimmetrikus pont az O2-hez képest. Mivel O1O2 az AA"A" háromszög középvonala, az AA" szakasz párhuzamos az O1O2 szakasszal és kétszer akkora hosszúságú. Az A ponttól az A pontig tartó irány egybeesik a pont irányával
O1 az O2 pontra. Jelöljünk most MN-nel egy olyan vektort, hogy az MN és O1 O2 szakaszok párhuzamosak, az MN szakasz kétszer olyan hosszú, mint az O1O2 szakasz, és az MN és O1O2 sugarak iránya azonos. Ekkor az AA" = MN, azaz az A" pontot az A pontból kapjuk párhuzamos átvitellel az MN vektorba.Ugyanez igaz az O1O2 egyenesen fekvő pontra is.
Végül azt kapjuk, hogy az O1 pontra vonatkozó szimmetria és az O2 pontra vonatkozó szimmetria összege párhuzamos fordítást jelent.
1.2 Mozgások
Az axiális szimmetriában, a forgásban (különösen a központi szimmetriában) és a párhuzamos transzlációban az a közös, hogy ezen transzformációk mindegyike a síkon lévő F alakzatot egyenértékű F alakzattá alakítja. Azokat a transzformációkat, amelyek rendelkeznek ezzel a tulajdonsággal, mozgásoknak nevezzük. A homotéta egy példa transzformáció, amely nem mozgás Valójában minden mozdulat egyenrangú alakká alakít, vagyis csak a figurák helyzetét változtatja meg a figurák méretét is.
A mozgások szerepe a geometriában
A mozgásnak óriási szerepe van a geometriában fontos szerep. Nem változtatják meg sem a figurák alakját, sem méretét, csak a figura helyét változtatják meg. De azok a figurák, amelyek csak a síkon elhelyezkedő helyükben különböznek egymástól, geometriai szempontból teljesen azonosak. Ezért nevezik őket „egyenlő alakoknak” a geometriában. Nincs ingatlan geometriai alakzat nem különbözik egy egyenlő alak megfelelő tulajdonságától. Így például az egyenlő háromszögeknek nemcsak azonos oldalai vannak, hanem azonos szögei, mediánjai, felezői, területei, beírt és körülírt kör sugarai és így tovább.
A geometria órákon mindig egyforma (vagyis mozgással kombinálható) figurákat tekintettünk azonosnak vagy megkülönböztethetetlennek. Az ilyen alakokat gyakran összetévesztik ugyanazzal a figurával. Ezért mondhatjuk, hogy például annak a problémának, hogy két a, b oldalt és a közöttük lévő C szöget használva háromszöget készítünk, egyetlen megoldása van. Valójában természetesen végtelen számú háromszöget találhatunk, amelyeknek adott a és b oldala és adott méretű C szöge van közöttük. Azonban ezek a háromszögek mindegyike egyforma, egyenlő, tehát „egy” háromszögnek tekinthetők.
Így a geometria az alakzatok azon tulajdonságait vizsgálja, amelyek azonosak az egyenlő ábrákra. Az ilyen tulajdonságokat "geometriai tulajdonságoknak" nevezhetjük. Más szóval: a geometria olyan alakzatok tulajdonságait vizsgálja, amelyek nem függnek a helyüktől. De a figurák, amelyek csak elhelyezkedésükben különböznek egymástól (egyenlő figurák), azok, amelyek mozgással kombinálhatók. Ezért a geometria tárgyának következő definíciójához jutunk; A geometria a figurák azon tulajdonságait vizsgálja, amelyek a mozgások során megmaradnak.
Mozgások a geometriában és a fizikában
Tehát a mozgás fogalma elsődleges szerepet játszik a geometriában. A mozgásokat („átfedés”) a VI. osztályban alkalmazták az egyenlő számok meghatározására, a háromszögek egyenlőségének bizonyítására; a mozgás fogalma, mint fentebb láttuk, a geometria tárgyának leírását is lehetővé teszi.
Mindeközben az alakegyenlőség fogalmának és a mozgás fogalmának definíciói között tátongó tátongó tátong. Valójában az egyenlő figurákat úgy határozták meg (VI. osztályban), mint azokat a figurákat, amelyek szuperpozícióval (azaz mozgással) kombinálhatók. A mozgásokat a fentiekben olyan transzformációkként határoztuk meg, amelyek két F1 és F sokszöget úgy alakítanak át, hogy van egy F" sokszög, amely homotetikus F-vel és egyenlő F1-gyel, majd az F sokszög szögei rendre megegyeznek az F" sokszög szögeivel, ill. az F sokszög oldalai rendre arányosak az F sokszög oldalaival." De az F sokszögnek ugyanazok a szögei és oldalai, mint az azonos F1 sokszögének. Ezért az F1 és F sokszögek hasonlóak abban az értelemben, ahogyan ez volt. osztályú geometria tanfolyamon értett.
Fordítva, legyenek az F1 és F sokszögek olyanok, hogy szögeik rendre egyenlőek, oldalaik pedig arányosak legyenek. Az F1 sokszög oldalainak és az F sokszög megfelelő oldalainak arányát k-val jelöljük. Ezután jelöljük F"-vel azt a sokszöget, amelyet az F-ből egy k együtthatóval rendelkező homotétiával kapunk (és tetszőleges homotégiaközépponttal. Ebben az esetben a tétel értelmében az F" és F1 sokszög oldala és szöge egyenlő lesz, azaz ezek a sokszögek egyenlőek lesznek, ezért az F1 és F sokszögek hasonlóak lesznek az itt megadott hasonlóság-definíció értelmében.
II. fejezet Affin transzformációk
2.1 A sík affin transzformációi
Az α affin transzformáció a sík transzformációja, amely minden egyenest egyenessé alakít, és megőrzi azt a kapcsolatot, amelyben egy pont feloszt egy szakaszt.
Az 1. ábrán: L"= α(L), A"=α(A), B"=α(B), C"=α(C),
|A transzformációk - mozgás és hasonlóság - az affinok speciális esetei, mivel a mozgás és a hasonlóság tulajdonságaiból adódóan az affin transzformációk meghatározásához szükséges összes követelmény teljesül.
Adjunk egy példát egy affin transzformációra, amely nem redukálható a korábban vizsgált transzformációra. Ennek érdekében először egy sík síkra való párhuzamos vetületét vesszük figyelembe.
Legyenek adottak a síkok: w és w1, egy l egyenes (tervezési irány), amely nem párhuzamos egyik síkkal sem (2. ábra). Az Aєw pontot az A1єw1 pont vetületének nevezzük, ha AA1||l, akkor az AA1 egyenest vetületi egyenesnek. A párhuzamos tervezés a w1 sík leképezése w-re.
Figyeljük meg a párhuzamos tervezés alábbi tulajdonságait.
1) Bármely a1 egyenes képe egyenes.
Valójában az a1 egyenes pontjait vetítő egyenesek egy síkot alkotnak (az a1-en halad át az l-lel párhuzamosan), amely w-vel metszve az a1 egyenes - a egyenes képét adja (2. ábra).
2) Megőrződik az a kapcsolat, amelyben a pont osztja a szakaszt, azaz.
(2. ábra)A szög oldalainak párhuzamos egyenesek általi metszéspontjára vonatkozó tételből azonnal következik.
Folytassuk közvetlenül az affin transzformáció példájának megalkotásával.
Vegyünk két másolatot a w síkból, és vigyük át az egyiket egy másik w1 pozícióba (3. ábra). Bármely Аєw pont új pozícióját А1єw1 jelöli. Most a w1 síkot valamilyen helyzetben w-re vetítjük, és az A1 pont vetületét A-val jelöljük."
Az eredmény a w sík önmagára való átalakulása, amelyben
. A párhuzamos vetítés szimmetrikus tulajdonságai miatt ehhez a transzformációhoz egy bizonyos affin transzformáció mindkét követelménye teljesül, ezért a most megszerkesztett transzformáció perspektivikus-affin.